機器人力控技術(shù)正在改變座椅檢測的傳統(tǒng)模式。達寬科技推出的力控解決方案專注于為座椅檢測提供智能化支持,通過實時力反饋和自適應(yīng)調(diào)整,確保檢測過程的穩(wěn)定性和一致性。在座椅檢測中,機器人力控能夠模擬真實使用場景下的受力情況,為產(chǎn)品質(zhì)量提供評估。系統(tǒng)可以根據(jù)不同檢測項目自動調(diào)整力度和動作,避免因人為操作差...
機器人力控基本參數(shù)
- 品牌
- 達寬科技,簡控機器人,新藍機器人
- 服務(wù)內(nèi)容
- 軟件開發(fā),軟件定制,技術(shù)開發(fā)
- 版本類型
- 普通版,增強版,標(biāo)準(zhǔn)版,測試版,單用戶版
- 適用范圍
- 企業(yè)用戶
機器人力控企業(yè)商機
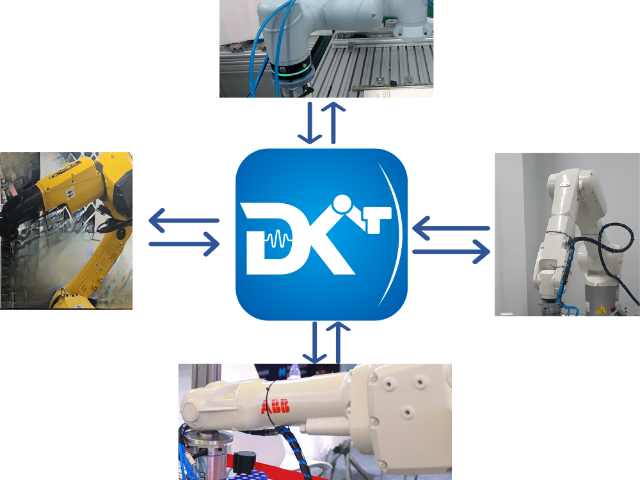
達寬科技的機器人力控系統(tǒng)具備強大的負載辨識能力,無論重量大小、形狀各異,不同材質(zhì),都能夠精確計算并識別末端負載的重量和重心參數(shù)。這一功能確保了在自動化流程中對負載的精確控制和調(diào)整。針對同一末端負載,我們的軟件支持在多種工況下進行力控調(diào)節(jié),以適應(yīng)不同的操作需求。無論是常規(guī)作業(yè)還是特殊應(yīng)用場景,都能實現(xiàn)精確的力控調(diào)節(jié)。該機器人力控系統(tǒng)軟件以其強大的兼容性而著稱,能夠?qū)崟r準(zhǔn)確地讀取來自不同品牌的力傳感器數(shù)據(jù),確保控制的精確性和智能化。此外,該軟件還能與包括ABB、KUKA、FANUC、新松等眾多品牌及型號的機器人實現(xiàn)實時通訊。無論是工業(yè)機械臂還是協(xié)作機器人,它都能實時讀取數(shù)據(jù),以實現(xiàn)強大化的協(xié)同作業(yè)。機器人力控技術(shù)不僅提高了生產(chǎn)效率,還增強了生產(chǎn)線的適應(yīng)能力,達寬科技助力企業(yè)應(yīng)對多變的市場需求。湖北機器人力控技術(shù)指導(dǎo)
本文我們將以ABB工業(yè)機器人為例,介紹如何基于達寬平臺級力控大腦裝配服務(wù)器的多種線束。首先,使用工具坐標(biāo)系精確示教多個線束接口和多個服務(wù)器接口的對應(yīng)初始位置。我們注意到,該服務(wù)器有多種規(guī)格的接口,我們演示了HDMI、USB、電源和網(wǎng)線的裝配,這四種線束是不同的接口,線束粗細也不同。使用工裝夾持線束接口,分別到達指定點位。面對這種裝配過程中的微小偏差和不規(guī)則性,達寬機器人力控系統(tǒng)采用了基于柔性力控的自適應(yīng)補償技術(shù)。這項技術(shù)利用六維力傳感器實時監(jiān)測力的微小變化,并控制機器人實時微調(diào)其位置和姿態(tài),在特定方向上減少力,從而讓接口能夠準(zhǔn)確對接。中國澳門協(xié)作機器人力控監(jiān)測達寬科技提供的機器人力控技術(shù)幫助企業(yè)降低了生產(chǎn)過程中的風(fēng)險,確保了生產(chǎn)操作的安全性。

機器人力控還可以與其他智能化系統(tǒng)進行深度集成,實現(xiàn)更為復(fù)雜的任務(wù)調(diào)度和協(xié)同工作。在多機器人協(xié)同作業(yè)時,力控技術(shù)可以協(xié)調(diào)各個機器人的力量,確保任務(wù)的順利完成,進一步提高了自動化系統(tǒng)的整體效率。總的來說,機器人力控技術(shù)的應(yīng)用不僅帶來了生產(chǎn)效率和安全性的提升,還為企業(yè)帶來了更多的創(chuàng)新機會。作為行業(yè)中的佼佼者,達寬科技憑借其先進的機器人力控解決方案,為全球制造業(yè)提供了強大的技術(shù)支持,幫助更多企業(yè)實現(xiàn)了自動化轉(zhuǎn)型和智能化升級。
機器人力控技術(shù)是當(dāng)今工業(yè)自動化領(lǐng)域的一項重要創(chuàng)新,它通過精確控制機器人與環(huán)境的接觸力,使機器人能夠在各種任務(wù)中提供更高的效率、精度和安全性。隨著科技的不斷進步,機器人力控已廣泛應(yīng)用于多個行業(yè),尤其是在制造業(yè)、物流、裝配等領(lǐng)域,成為提高生產(chǎn)效率和產(chǎn)品一致性的關(guān)鍵工具。首先,機器人力控能夠顯著提高機器人執(zhí)行任務(wù)時的精度和靈活性。傳統(tǒng)機器人主要依靠預(yù)設(shè)的路徑和動作進行操作,而機器人力控技術(shù)可以實時感知環(huán)境變化,靈活調(diào)整機器人的動作與施力,從而確保高精度的操作,特別適合那些需要細致操作的任務(wù),比如裝配、涂裝或精密檢測等。機器人力控技術(shù)增強了機器人對外部變化的應(yīng)對能力,達寬科技的技術(shù)讓自動化生產(chǎn)更加高效。

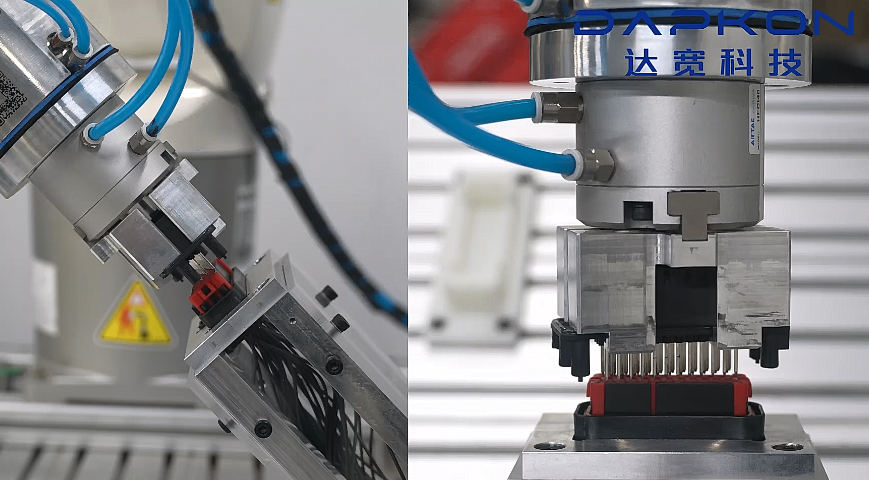
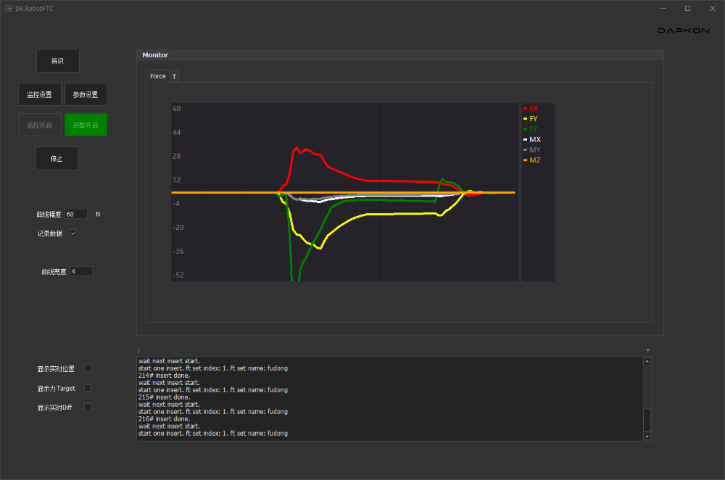
本文我們將以KUKA工業(yè)機器人為例,介紹如何基于達寬平臺級機器人力控大腦裝配汽車ECU控制器插頭35p線束。首先,使用工具坐標(biāo)系精確示教線束接口的初始位置。35針腳連接器因其眾多的針腳和較大的接觸面積,在傳統(tǒng)裝配過程中會產(chǎn)生較大的干擾外力。這不僅要求機器人具有極高的裝配精度,而且裝配過程中的干擾外力也可能造成影響。例如,在裝配過程中,如果因來料誤差等原因,機器人施加過大的力量,有損壞連接器的風(fēng)險。如何在不損壞連接器的前提下,精確地將線束連接到指定位置?在測試過程中,我們發(fā)現(xiàn)依賴位置判斷可能導(dǎo)致在工裝偏移或誤差時損壞連接器。而依賴力判斷可能因干擾外力誤判而認為已到達指定位置,但這種方法能確保連接器不受損害,提升安全性。因此,結(jié)合位置和力的雙重判斷是更為穩(wěn)妥的解決方案。借助達寬科技的機器人力控技術(shù),用戶可以輕松實現(xiàn)高精度控制,確保產(chǎn)品一致性,提升生產(chǎn)質(zhì)量。遼寧機器人力控原理
機器人力控技術(shù)能夠自動調(diào)節(jié)生產(chǎn)過程中產(chǎn)生的力,達寬科技的解決方案幫助企業(yè)提升了工作效率。湖北機器人力控技術(shù)指導(dǎo)
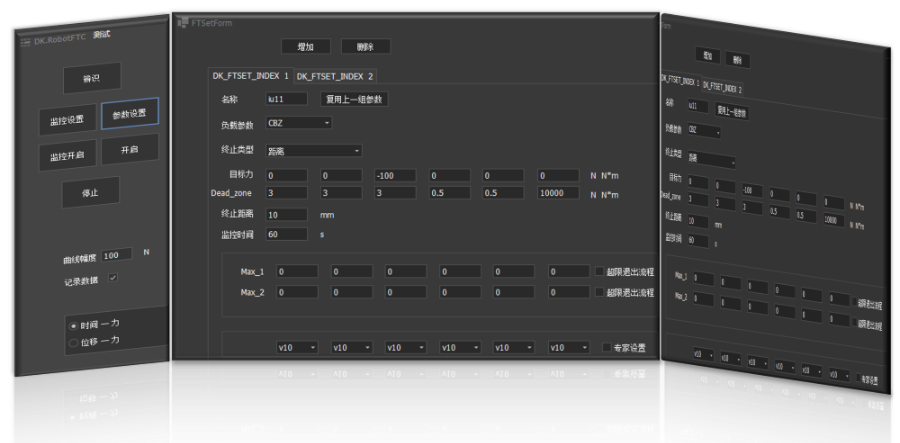
為了進一步提高安全,達寬機器人力控系統(tǒng)引入了力超限報警系統(tǒng)。該系統(tǒng)在每個監(jiān)測方向上設(shè)定了兩級報警閾值,并配備了超限自動停止功能。這樣,一旦檢測到施加的力超過設(shè)定的安全界限或操作時間超出預(yù)定時長,系統(tǒng)將立即發(fā)出警告,并自動中斷操作,同時通知相關(guān)工作人員。在進行機器人座椅熨燙作業(yè)前,須在示教器中預(yù)先設(shè)定一條自動化熨燙路徑。操作開始時,機器人會將熨斗引導(dǎo)至座椅表面,緩慢靠近并施加初步的力,然后沿著預(yù)設(shè)軌跡在座椅上移動。在此過程中,達寬機器人力控系統(tǒng)會依據(jù)實時反饋微調(diào)熨燙力度。例如,座椅的某些區(qū)域可能因褶皺或其他因素導(dǎo)致表面存在誤差。利用達寬力控系統(tǒng)的自適應(yīng)補償技術(shù),能夠自動調(diào)整機器人施加的力度,以適應(yīng)微小的偏差和不規(guī)則性。湖北機器人力控技術(shù)指導(dǎo)
與機器人力控相關(guān)的文章
陜西工業(yè)機器人力控優(yōu)點
- 貴州協(xié)作機器人力控設(shè)計 2025-07-08
- 吉林機器人力控推薦 2025-07-08
- 山東工業(yè)機器人力控抓取 2025-07-08
- 浙江工業(yè)機器人力控裝配 2025-07-08
- 福建協(xié)作機器人力控方案 2025-07-07
- 云南協(xié)作機器人力控系統(tǒng) 2025-07-07
- 海南協(xié)作機器人力控使用方法 2025-07-07
- 甘肅協(xié)作機器人力控使用方法 2025-07-07
- 重慶工業(yè)機器人力控推薦 2025-07-07
- 河南工業(yè)機器人力控推薦 2025-07-07
- 天津協(xié)作機器人力控優(yōu)點 2025-07-07
- 廣西機器人力控推廣 2025-07-07
與機器人力控相關(guān)的產(chǎn)品
與機器人力控相關(guān)的新聞
-
新疆工業(yè)機器人力控供應(yīng)商 2025-07-06 08:08:16機器人力控賦能智能制造,重塑高效生產(chǎn)新體驗在工業(yè)自動化快速發(fā)展的,機器人力控技術(shù)已成為推動生產(chǎn)革新的驅(qū)動力。達寬科技深耕機器人力控領(lǐng)域,通過高精度傳感器與智能算法,賦予機器人動態(tài)感知與自適應(yīng)調(diào)節(jié)能力。無論是精密裝配、復(fù)雜曲面打磨,還是高靈敏度抓取,機器人力控技術(shù)均能實時響應(yīng)環(huán)境變化,確保任務(wù)執(zhí)行的穩(wěn)...
-
云南機器人力控調(diào)試 2025-07-06 00:19:26在PCBA線束裝配領(lǐng)域,機器人力控技術(shù)的應(yīng)用正推動著生產(chǎn)效率和質(zhì)量的雙重提升。達寬科技推出的力控解決方案,通過實時力反饋和自適應(yīng)調(diào)整,為PCBA線束裝配提供了智能化支持。這種技術(shù)能夠確保每一個連接點的穩(wěn)定性和一致性,從而提升產(chǎn)品質(zhì)量和生產(chǎn)效率。機器人力控的優(yōu)勢在于其靈活性和適應(yīng)性。在PCBA線束裝配...
-
山西機器人力控設(shè)計 2025-07-06 01:08:54在電子制造領(lǐng)域,機器人力控技術(shù)正成為提升裝配效率和質(zhì)量的創(chuàng)新力量。達寬科技的機器人力控解決方案專注于內(nèi)存條裝配,通過實時力反饋和自適應(yīng)調(diào)整,確保每一個內(nèi)存條都能以比較好狀態(tài)完成裝配。這種技術(shù)的應(yīng)用不僅減少了人工干預(yù)的需求,還有效縮短了裝配時間,提升了整體生產(chǎn)效率。機器人力控的優(yōu)勢在于其對復(fù)雜裝配任務(wù)...
-
甘肅機器人力控拋光 2025-07-06 08:08:16在現(xiàn)代制造業(yè)中,機器人力控技術(shù)正成為提升服務(wù)器線束裝配效率和質(zhì)量的驅(qū)動力。達寬科技的力控解決方案通過實時力反饋和自適應(yīng)調(diào)整,確保每一個連接點都能以比較好狀態(tài)完成裝配。這種技術(shù)的應(yīng)用不僅減少了人工干預(yù)的需求,還縮短了裝配時間,提升了整體生產(chǎn)效率。機器人力控的優(yōu)勢在于其對復(fù)雜裝配任務(wù)的優(yōu)化能力。在服務(wù)器...
與機器人力控相關(guān)的問題
與機器人力控相關(guān)的標(biāo)簽
新聞資訊
產(chǎn)品推薦
-
廣西機器人力控推廣
2025-07-07 -
上海機器人力控裝配
2025-07-07 -
海南協(xié)作機器人力控抓取
2025-07-07 -

中國澳門協(xié)作機器人力控定制
2025-07-06 -
吉林機器人力控報價
2025-07-06 -

新疆工業(yè)機器人力控供應(yīng)商
2025-07-06 -

云南機器人力控調(diào)試
2025-07-06 -
山西機器人力控設(shè)計
2025-07-06 -

甘肅機器人力控拋光
2025-07-06