使用達(dá)寬平臺級力控大腦進(jìn)行機器人座椅力控檢測有以下優(yōu)勢: 數(shù)據(jù)的實時采集與可追溯能力達(dá)寬機器人力控檢測系統(tǒng)能夠?qū)崟r收集檢測數(shù)據(jù),并在用戶界面中通過曲線直觀地展示給用戶,滿足廠商記錄座椅檢測數(shù)據(jù)的需求。此外,系統(tǒng)在每個伺服周期均對工藝數(shù)據(jù)進(jìn)行實時記錄(ms級),***保障流程的可追溯性、可復(fù)...
力控系統(tǒng)基本參數(shù)
- 品牌
- 達(dá)寬科技,簡控機器人,新藍(lán)機器人
- 服務(wù)內(nèi)容
- 技術(shù)開發(fā),軟件開發(fā),軟件定制
- 版本類型
- 測試版,普通版,標(biāo)準(zhǔn)版,升級版,單用戶版,代理版,終身使用,增強版
- 適用范圍
- 企業(yè)用戶
- 系統(tǒng)要求
- windows,LINUX
力控系統(tǒng)企業(yè)商機
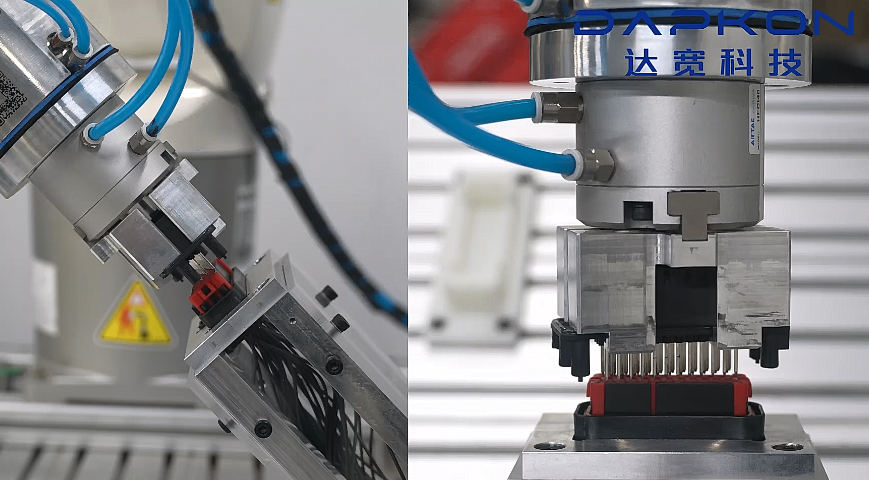
傳統(tǒng)人工裝配PCBA線束,不僅耗時費力,還易受人為因素干擾,影響裝配質(zhì)量和效率的穩(wěn)定性。如今,隨著工業(yè)自動化技術(shù)的發(fā)展,機器人在該領(lǐng)域應(yīng)用增多,但在力度和位置的精細(xì)控制上仍有不足。為確保連接點達(dá)高標(biāo)準(zhǔn)質(zhì)量,力控技術(shù)引入十分關(guān)鍵。該技術(shù)使機器人能在高精度、高速度下完成復(fù)雜線束裝配,減少人為干預(yù),提升生產(chǎn)效率和產(chǎn)品質(zhì)量。達(dá)寬科技的柔性力控系統(tǒng)已落地多家頭部汽車電子、工控機、服務(wù)器廠家,助力其精密裝配過程實現(xiàn)自動化、智能化、數(shù)字化改造。達(dá)寬科技機器人力控搭載補償算法,保障高速裝配穩(wěn)定性,降低設(shè)備磨損,延長產(chǎn)線壽命。上海抓取力控系統(tǒng)調(diào)試

達(dá)寬力控系統(tǒng)在數(shù)據(jù)層面賦能具身智能
數(shù)據(jù)層面:
提供真實的力覺反饋大量真實場景:
達(dá)寬力控系統(tǒng)已經(jīng)批量化在工業(yè)場景中交付使用,涉及汽車、3C、一般工業(yè)中的裝配、插拔、打磨、檢測等。在達(dá)寬科技交付的數(shù)十種應(yīng)用場景的生產(chǎn)過程中,機器人持續(xù)積累毫秒級的多維度數(shù)據(jù)(機器人位置、速度、加速度、傳感器采集力、接觸力、補償量等),為行業(yè)和客戶提供了工藝優(yōu)化、數(shù)據(jù)孿生、擴增、訓(xùn)練的數(shù)據(jù)基礎(chǔ)。
增加力覺數(shù)據(jù):
達(dá)寬力控系統(tǒng)提供帶標(biāo)注的力覺數(shù)據(jù)集,實時采集真實的外部接觸力數(shù)據(jù),可識別滑動、碰撞、穩(wěn)定抓取等狀態(tài),動態(tài)摩擦系數(shù)估計等等,助力生成高保真虛擬訓(xùn)練環(huán)境,并彌補純視覺感知的不足。
數(shù)據(jù)閉環(huán):
力控系統(tǒng)記錄人類抓取動作、環(huán)境交互數(shù)據(jù),反哺AI模型優(yōu)化,加速Sim2Real遷移,如提供力/位/視覺同步數(shù)據(jù),提**化學(xué)習(xí)和模仿學(xué)習(xí)中的高保真訓(xùn)練環(huán)境,縮小Sim2Real差距。 工業(yè)機器人力控系統(tǒng)優(yōu)點力控系統(tǒng)支持柔性化生產(chǎn)布局,達(dá)寬科技方案無縫銜接多車型線束裝配任務(wù),加速產(chǎn)線智能化升級。

基于達(dá)寬平臺級力控大腦的機器人力控熨燙座椅系統(tǒng),由以下四個組成部分構(gòu)成:1.機器人本體:機器人是整個系統(tǒng)的,負(fù)責(zé)座椅的運動和熨燙設(shè)備的控制。2.傳感器:傳感器用于檢測座椅的形狀、材質(zhì)和溫度,為機器人提供實時反饋信息。3.熨燙設(shè)備:熨燙設(shè)備包括熨燙板和加熱元件,用于提供高溫熨燙。4.達(dá)寬力控系統(tǒng):力控系統(tǒng)負(fù)責(zé)整個過程的調(diào)整控制,確保熨燙過程安全順利進(jìn)行。
為了保護(hù)價格不菲且材質(zhì)優(yōu)良的座椅,我們需要謹(jǐn)慎處理熨燙過程中的潛在損害,并確保操作的安全性。達(dá)寬力控系統(tǒng)通過機器人力控技術(shù),實時監(jiān)測機器人施加的力度,并在必要時減少特定方向上的力,從而避免對座椅面料施加過大的壓力,防止因過度壓迫而損傷座椅。
使用達(dá)寬平臺級力控大腦進(jìn)行機器人座椅力控檢測有以下優(yōu)勢:
模擬真實使用場景
通過達(dá)寬力控技術(shù)與定制工裝,機器人能精細(xì)模擬人體在各類場景下的座椅使用行為,涵蓋人體臀部、背部的壓力分布等細(xì)節(jié)。力控系統(tǒng)可執(zhí)行長時間進(jìn)出座椅測試,高度還原真實使用場景,***評估座椅耐久性與可靠性,嚴(yán)守座椅實際使用性能與設(shè)計要求的高度契合。
提高檢測效率
與傳統(tǒng)的人工檢測方法相比,機器人力控檢測方案能夠顯著提高檢測效率。機器人具備24小時全天候不間斷工作的能力,并且能夠***縮短模擬磨損所需的時間。這種高效的檢測能力使得企業(yè)能夠在更短的時間內(nèi)完成更多的檢測任務(wù),加快產(chǎn)品上市速度,提高市場競爭力。 力控系統(tǒng)自適應(yīng)參數(shù)動態(tài)調(diào)整,達(dá)寬科技支持多型號PCBA線束快速切換,減少產(chǎn)線停機等待時間。

汽車線束裝配在連接電氣設(shè)備電纜中起著至關(guān)重要的作用。達(dá)寬力控系統(tǒng)能保障PCBA的每個連接點都符合嚴(yán)格的質(zhì)量標(biāo)準(zhǔn),進(jìn)而增強連接的穩(wěn)定性與產(chǎn)品的統(tǒng)一性。PCBA在眾多消費電子產(chǎn)品如智能手機、平板電腦、電視、音響、游戲機等中發(fā)揮著作用,其通過線束與傳感器、電池等部件相連,還涉及板對板的連接。達(dá)寬力控系統(tǒng)可精細(xì)調(diào)控機器人輸出力,減少對敏感元件或易損線束造成損傷的風(fēng)險。服務(wù)器線束裝配是一項復(fù)雜且耗時的任務(wù)。力控系統(tǒng)能夠精確控制機器人輸出的力,有效應(yīng)對線束裝配過程中出現(xiàn)的微小偏差和不規(guī)則性,從而提升每個裝配動作的準(zhǔn)確性和可靠性。力控系統(tǒng)智能識別線序規(guī)范,達(dá)寬科技方案消除誤接風(fēng)險,確保服務(wù)器連接安全可靠。浙江新藍(lán)機器人力控系統(tǒng)軟件
力控系統(tǒng)支持柔性化產(chǎn)線布局,達(dá)寬科技方案無縫切換不同模數(shù)齒輪裝配任務(wù)。上海抓取力控系統(tǒng)調(diào)試
在智能制造蓬勃發(fā)展的當(dāng)下,達(dá)寬科技研發(fā)的引導(dǎo)手柄憑借機器人動力學(xué)引擎與先進(jìn)AI技術(shù),針對當(dāng)下機器人打磨技術(shù)難題而生。其一,借助直觀引導(dǎo)與智能算法,該手柄讓機器人示教變得簡潔明了,輕松應(yīng)對復(fù)雜打磨場景。其二,它突破傳統(tǒng)示教限制,可靈活調(diào)整機器人拖動速度,省去示教器繁瑣操作。其三,無編程基礎(chǔ)人員也能迅速掌握,大幅降低技術(shù)門檻。其四,優(yōu)化示教流程,從安裝到投產(chǎn)時間大幅縮短,部署效率提升。其五,適配能力強,能快速匹配新機型,與主流品牌機器人如Abb、Fanuc、Kuka、Keba及諸多國產(chǎn)機器人無縫對接,響應(yīng)速度達(dá)4毫秒,通用性極高。搭配達(dá)寬科技柔性力控系統(tǒng),該引導(dǎo)手柄可提升機器人打磨質(zhì)量和效率。柔性力控技術(shù)可適應(yīng)不同材質(zhì)、形狀打磨任務(wù),全程保持力度均衡。它確保機器人以合適力度打磨,避免過度或不足,提升打磨品質(zhì)。同時,通過精細(xì)調(diào)控機器人速度與力度,該技術(shù)優(yōu)化打磨效果,減輕工人負(fù)擔(dān),進(jìn)一步增效。上海抓取力控系統(tǒng)調(diào)試
與力控系統(tǒng)相關(guān)的文章

上海工業(yè)機器人力控系統(tǒng)監(jiān)測
- 北京搬運力控系統(tǒng)報價 2025-06-29
- 廣東檢測力控系統(tǒng)調(diào)試 2025-06-29
- 打磨力控系統(tǒng)方案 2025-06-28
- 河南高精度力控系統(tǒng)方案 2025-06-28
- 北京工業(yè)機器人力控系統(tǒng)原理 2025-06-28
- 湖北柔性力控系統(tǒng)監(jiān)測 2025-06-27
- 廣東檢測力控系統(tǒng)廠家 2025-06-27
- 江蘇工業(yè)力控系統(tǒng)設(shè)計 2025-06-27
- 中國香港新藍(lán)機器人力控系統(tǒng)優(yōu)點 2025-06-27
- 遼寧達(dá)寬力控系統(tǒng) 2025-06-26
- 浙江搬運力控系統(tǒng)調(diào)試 2025-06-26
- 力控系統(tǒng)軟件 2025-06-26
與力控系統(tǒng)相關(guān)的產(chǎn)品


與力控系統(tǒng)相關(guān)的新聞
-
上海高精度力控系統(tǒng) 2025-06-26 13:07:26使用達(dá)寬平臺級力控大腦進(jìn)行機器人座椅力控檢測有以下優(yōu)勢: .高精確性與高重復(fù)性達(dá)寬科技的機器人力控系統(tǒng)可精細(xì)控制并測量機器人施加的力,滿足座椅廠商對剛性測試和耐久性測試等內(nèi)容的測試需求。在執(zhí)行檢測任務(wù)過程中,機器人力控系統(tǒng)展現(xiàn)出***的重復(fù)性與一致性,能夠嚴(yán)格按照預(yù)設(shè)的力值精細(xì)均勻地施加壓...
-
河南智能力控系統(tǒng)推薦 2025-06-26 07:14:34達(dá)寬科技:構(gòu)建機器人力控技術(shù)新生態(tài)面對電池防爆閥裝配的定制化需求,達(dá)寬科技打造了開放兼容的機器人力控平臺,支持多品牌機器人集成與工藝參數(shù)快速遷移。無論是力控精度優(yōu)化、工藝知識庫搭建,還是產(chǎn)線數(shù)字化管理,機器人力控系統(tǒng)均可提供模塊化擴展能力。達(dá)寬科技與產(chǎn)業(yè)鏈伙伴協(xié)同創(chuàng)新,持續(xù)豐富力控應(yīng)用場景庫,幫助客...
-
上海新藍(lán)機器人力控系統(tǒng)優(yōu)勢 2025-06-26 05:07:14使用達(dá)寬平臺級力控大腦進(jìn)行機器人座椅力控檢測有以下優(yōu)勢: 模擬真實使用場景 通過達(dá)寬力控技術(shù)與定制工裝,機器人能精細(xì)模擬人體在各類場景下的座椅使用行為,涵蓋人體臀部、背部的壓力分布等細(xì)節(jié)。力控系統(tǒng)可執(zhí)行長時間進(jìn)出座椅測試,高度還原真實使用場景,***評估座椅耐久性與可靠性,嚴(yán)守座椅實...
-
中國香港工業(yè)力控系統(tǒng)使用方法 2025-06-25 12:05:23防爆閥的微小裝配偏差可能引發(fā)嚴(yán)重安全隱患,這對過程控制提出嚴(yán)苛要求。達(dá)寬科技力控系統(tǒng)構(gòu)建從數(shù)據(jù)采集、實時分析到反饋優(yōu)化的完整閉環(huán)。例如,在壓裝工序中,系統(tǒng)對比理論壓力曲線與實際值,自動修正機械臂運動軌跡,并將異常工況標(biāo)記為學(xué)習(xí)樣本。企業(yè)可通過數(shù)據(jù)追溯功能快速定位問題批次,縮短質(zhì)量分析周期。達(dá)寬科技力...
與力控系統(tǒng)相關(guān)的問題
與力控系統(tǒng)相關(guān)的標(biāo)簽
新聞資訊
產(chǎn)品推薦
-
內(nèi)蒙古協(xié)作機器人力控供應(yīng)商
2025-07-14 -

青海機器人力控優(yōu)點
2025-07-14 -

廣西工業(yè)機器人力控配置
2025-07-14 -
中國香港機器人力控精密裝配
2025-07-14 -

遼寧機器人力控精密裝配
2025-07-14 -

寧夏工業(yè)機器人力控抓取
2025-07-14 -
云南協(xié)作機器人力控系統(tǒng)
2025-07-14 -
廣西工業(yè)機器人力控裝配
2025-07-14 -
山西工業(yè)機器人力控使用方法
2025-07-14