功能與性能問題功能不匹配:軟件的功能與實驗臺的實際需求不匹配,無法充分發揮實驗臺的性能。例如,軟件沒有提供實驗臺所需的特定運動操控功能,或者軟件的操控邏輯與實驗臺的硬件結構不匹配,導致機器人無法完成預期任務。性能瓶頸:軟件的算法復雜度較高,而實驗臺的硬件性能有限,會導致軟件運行緩慢,影響機器...
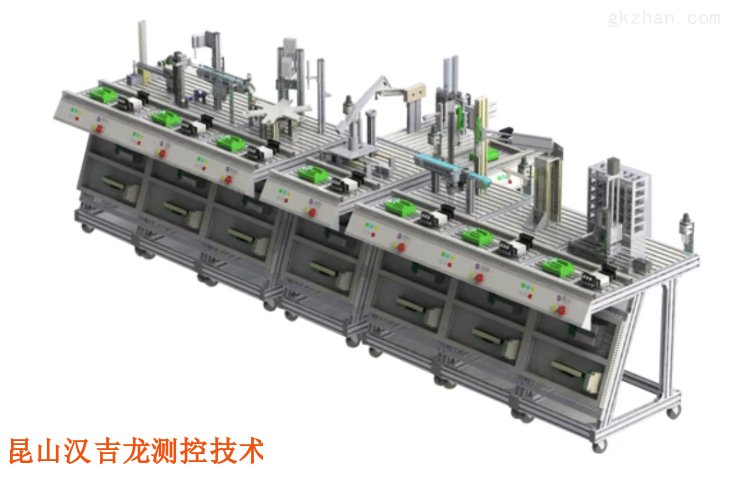
自動化智能機器人實驗臺基本參數
- 品牌
- VALENIAN/瓦倫尼安
- 型號
- VT-ZP500
- 類型
- 自動化實訓臺
- 加工定制
- 是
- 用途
- 教學實訓
- 電機功率
- 2
- 外形尺寸
- 1200X1000X1500
- 重量
- 10
- 產地
- 蘇州
- 廠家
- 昆山漢吉龍測控技術有限公司
自動化智能機器人實驗臺企業商機
自動化智能機器人實驗臺通常是可以兼容其他設備的,以下從硬件和軟件層面為你分析說明:硬件層面接口標準化:大多數自動化智能機器人實驗臺會設計有多種標準接口,如USB接口可連接電腦、傳感器、外部存儲設備等;以太網接口能與網絡設備、其他智能設備進行網絡通信;串口可連接一些具有串口通信功能的模塊或設備,像特定的傳感器、方便數據傳輸和設備間的協同工作。總線技術:采用如CAN總線、Profibus總線等工業總線標準的實驗臺,可以很方便地連接各種支持相應總線協議的設備,如智能電機、驅動器、分布式I/O模塊等,實現多設備之間的高速、可靠數據通信和協同。通用性機械結構:實驗臺的機械結構設計往往具有一定通用性和開放性。例如,具備標準的安裝孔位、導軌或卡槽等,可根據需要安裝不同的夾具、工具或其他輔助設備,方便與不同外形尺寸和安裝要求的設備進行機械連接和集成。 實驗臺助力機器人技術走向成熟。國產自動化智能機器人實驗臺價格
自動化智能機器人實驗臺可使用的數據分析算法種類繁多,以下是一些常見的算法:數據預處理算法歸一化算法:該算法將數據映射到特定的區間,如將數據歸一化到[0,1]或[-1,1]區間,不同特征之間在量綱和取值范圍上的差異,使數據具有可比性,提升后續算法的準確性和穩定性。例如,機器人的傳感器數據中,距離數據可能在0-10米范圍,而溫度數據可能在0-100攝氏度范圍,通過歸一化可將它們統一到相同的尺度。濾波算法:包括均值濾波、中值濾波、卡爾曼濾波等。均值濾波和中值濾波可去除數據中的噪聲,前者取一定窗口內數據的平均值來平滑數據,后者取窗口內數據的中值來脈沖噪聲。卡爾曼濾波則用于處理具有動態特性的數據,能在噪聲環境下對機器人的狀態進行比較好估計,如在機器人中,結合傳感器測量值和運動模型,準確估計機器人的位置和速度。氣動系統自動化智能機器人實驗臺哪里買自動化實驗臺會提升效率嗎?

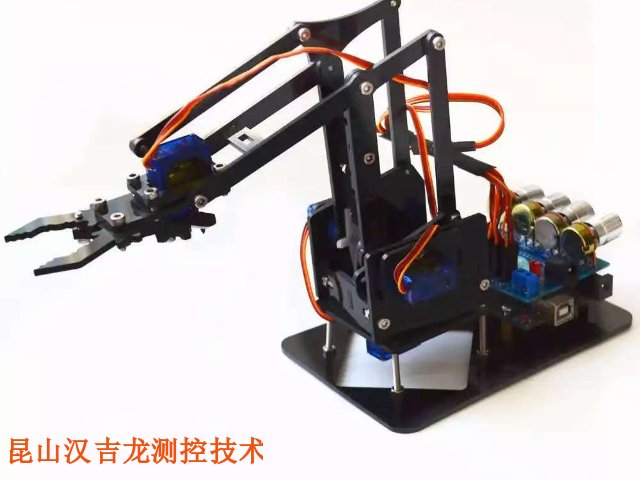
決策與操控方面自主決策能力:面對復雜多樣的實驗任務和動態變化的實驗環境,機器人需具備自主決策能力,如根據實驗進展選擇合適操作流程、應對突等。但當前人工智能模型在處理復雜任務決策時,存在依賴大量數據和計算資源、決策過程難以解釋等問題,限制了機器人在實驗場景中的自主決策能力1。運動操控精度與穩定性:實驗臺的機器人通常要完成高精度的操作任務,如微量液體的吸取和滴加、微小零件的裝配等,這要求運動操控達到亞毫米甚至微米級精度。同時,在高速運動或長時間運行時,還需保證系統的穩定性和可靠性,防止出現振動、誤差累積等問題。多機器人協同操控:一些實驗可能需要多個機器人協同工作,如共同完成大型實驗裝置的操作或進行多步驟實驗。此時,如何實現多機器人之間的精確同步、任務分配和協調配合,避免相互干擾和碰撞,是一個復雜的技術挑戰。
研發團隊經驗豐富的團隊:有豐富的機器人研發經驗、技術人才配備,包括機械工程師、電氣工程師、軟件工程師、操控工程師等,且團隊協作能力強的研發團隊,能夠完成各個階段的工作,可縮短研發周期,可能比一般情況快20%-30%左右。經驗欠缺的團隊:如果是新組建或缺乏相關經驗的團隊,在技術探索、問題解決、方案優化等方面會花費更多時間,研發周期可能會比經驗豐富的團隊長30%-50%。資源支持充足的資源:充足能保證研發過程中所需的設備采購、材料供應、人員薪酬等及時到位,同時擁有豐富的實驗設備、測試場地等資源,可加快研發進度,使研發周期處于正常或偏短水平。資源有限:***可能導致設備采購延遲、研發人員不足,資源匱乏會影響實驗和測試的效率,從而使研發周期延長。自動化智能機器人實驗臺操作簡單嗎?

自動化智能機器人實驗臺的技術難點主要體現在以下幾個方面:感知技術方面傳感器精度與穩定性:要精確感知實驗環境中的各種信息,如物**置、環境溫度、濕度等,傳感器需具備高靈敏度和精度。但目前部分傳感器易受環境干擾,如視覺傳感器在光線復雜或有遮擋時精度下降,且長期使用可能出現性能漂移,影響實驗數據準確性和機器人操作精度。多傳感器融合:為***感知環境,實驗臺常配備多種傳感器,如視覺、聽覺、觸覺傳感器等。然而,不同類型傳感器數據格式、采樣頻率和精度各異,實現多源數據的融合與處理,以提供準確***的環境信息,是一大技術難點。復雜環境感知:實驗環境可能存在動態變化因素,如人員走動、物體移動等,以及復雜的物理、化學條件,如強磁場、腐蝕性氣體等。機器人需在這些復雜環境中準確感知目標和自身狀態,這對傳感器的抗干擾能力和感知算法的適應性提出了很高要求。 自動化智能機器人實驗臺的性價比高不高呢?自動化裝置自動化智能機器人實驗臺使用方法
實驗臺的機械結構如何設計能適應不同類型機器人的安裝?國產自動化智能機器人實驗臺價格
軌跡規劃與優化方面模型預測操控算法(MPC):通過建立機器人的運動模型,預測機器人在未來一段時間內的運動軌跡,然后在每個操控周期內,基于預測結果和當前狀態,優化計算出**優的操控輸入序列,使機器人沿著**接近理想的軌跡運動,從而提高軌跡精度,減少運動偏差。基于樣條曲線的軌跡規劃算法:如采用B樣條曲線等方法進行軌跡規劃,可生成平滑、連續的運動軌跡,避免軌跡中的不連續點或突變,減少機器人在運動過程中的沖擊和振動,保證機器人能夠精確地按照預設軌跡運動,提高操作的平穩性和精度。增強系統魯棒性方面滑模操控算法:在系統狀態空間中定義一個滑動面,使系統在受到外部干擾或模型不確定性影響時,能迅速調整到滑動面上并保持在滑動面上運動,對系統的參數變化和外部干擾具有很強的魯棒性,確保機器人在復雜的實驗環境或存在干擾的情況下,仍能保持較高的操作精度。魯棒操控算法:設計時充分考慮了系統模型的不確定性和可能存在的外部干擾,通過優化操控參數和結構,使系統在各種不確定因素下都能保持穩定的性能,保證機器人的運動精度不受影響,提高實驗臺在不同工況下的可靠性和準確性。 國產自動化智能機器人實驗臺價格
與自動化智能機器人實驗臺相關的文章

電機自動化智能機器人實驗臺設備
- 預測性自動化智能機器人實驗臺保修 2025-03-01
- 漢吉龍自動化智能機器人實驗臺系統 2025-02-28
- ABB自動化智能機器人實驗臺用途 2025-02-27
- 漢吉龍自動化智能機器人實驗臺服務 2025-02-27
- 設備自動化智能機器人實驗臺公司 2025-02-27
- 國產自動化智能機器人實驗臺價格 2025-02-26
- 非標型自動化智能機器人實驗臺系統 2025-02-26
- 實物自動化智能機器人實驗臺怎么做 2025-02-24
- 多功能自動化智能機器人實驗臺企業 2025-02-23
- VALENIAN自動化智能機器人實驗臺 2025-02-22
- 漢吉龍自動化智能機器人實驗臺廠家 2025-02-17
- 江蘇自動化智能機器人實驗臺貼牌 2025-02-17
與自動化智能機器人實驗臺相關的產品

與自動化智能機器人實驗臺相關的新聞
-
PLC自動化智能機器人實驗臺廠家排名 2025-02-09 04:06:23自動化智能機器人實驗臺是一種用于開展智能機器人相關實驗和研究的設備平臺,以下是關于它的一些介紹:功能運動操控功能:可實現機器人的移動、關節運動等基本動作操控,通過編程設定機器人的運動軌跡、速度、加速度等參數,如讓機械臂按照特定路徑抓取和放置物體,或使移動機器人在設定區域內自主導航。感知功...
-
自動生產線自動化智能機器人實驗臺裝置 2025-02-06 14:06:48機械結構與材料方面高精度機械設計與制造:為滿足機器人的高精度運動和操作要求,實驗臺的機械結構需要具備高精度的加工和裝配工藝。例如,機器人手臂的關節精度、導軌的直線度和平行度等都對實驗操作精度有直接影響,制造過程中的微小誤差可能會在實驗中被放大,導致實驗結果不準確。材料性能與適應性:實驗環...
-
6軸自動化智能機器人實驗臺批發 2025-02-05 16:08:15安全與穩定性問題安全漏洞:軟件可能存在安全漏洞,容易受到網絡,從而影響實驗臺的正常運行,甚至導致機器人失控等安全。例如,***可能通過軟件漏洞入侵實驗臺系統,篡改機器人的指令。穩定性問題:軟件可能存在內存泄漏、程序崩潰等穩定性問題,影響實驗的正常進行。例如,長時間運行軟件后,由于內存泄漏導致...
-
氣路連接自動化智能機器人實驗臺設備 2025-01-27 02:07:16合作與資源共享產學研合作:與高校、科研機構合作,利用其科研資源和人才優勢,共同開展研發工作。高校和科研機構可能擁有實驗設備和技術,通過合作可以降低企業的研發成本。行業內合作:與同行企業或相關企業合作,共享技術、資源和經驗。例如,多家企業可以共同建設一個公共的機器人實驗平臺,實現資源共享。...
與自動化智能機器人實驗臺相關的問題
與自動化智能機器人實驗臺相關的標簽
新聞資訊
產品推薦
-
福建俄羅斯激光對中儀
2025-07-11 -

湖南設備激光對中儀
2025-07-11 -

瑞典激光對中儀器寫論文
2025-07-11 -

專業級激光對中儀器保養
2025-07-11 -

在線激光對中儀定制
2025-07-11 -

無錫激光對中儀怎么用
2025-07-11 -

國產激光對中儀器定做
2025-07-11 -

軸激光對中儀操作
2025-07-11 -
吉林旋轉機械激光對中儀
2025-07-11