無人機(jī)只需要從基地起飛,就能夠?qū)χ付▍^(qū)域進(jìn)行巡檢,智能攝像頭能夠自動問診地面,識別護(hù)欄錯位、路面積水、凹陷、裂縫、交通事故、車流異常等問題,然后標(biāo)記位置。而控制中心能夠?qū)崟r查看前方畫面,接收無人機(jī)回傳的數(shù)據(jù),并進(jìn)行診斷分析,整個過程無需過多的人工干預(yù)。這種無人機(jī)智能問診,是通過向無人機(jī)植入高性能的A...
目標(biāo)跟蹤基本參數(shù)
- 品牌
- 慧視科技
- 型號
- 可咨詢
- 輸出信號
- 數(shù)字型,定制
- 制作工藝
- 集成,薄膜,陶瓷,可定制
- 材質(zhì)
- 可定制
- 材料物理性質(zhì)
- 導(dǎo)體,磁性材料,定制
- 材料晶體結(jié)構(gòu)
- 定制
- 加工定制
- 是
目標(biāo)跟蹤企業(yè)商機(jī)
進(jìn)入冬季,北方各地陸續(xù)出現(xiàn)冰凍天氣,給不少地方的保供電工作增添了難度。目前,大多數(shù)地方都采用無人機(jī)巡檢的模式,但是面臨如此寒凍的天氣,無人機(jī)也可能會“懈怠”。但是大面積覆冰的影響下,人工巡檢又很難到達(dá)很多區(qū)域,所以還是不得不依靠無人機(jī),只是需要性能更加強(qiáng)悍的無人機(jī)。無人機(jī)電力巡檢依靠可見光或者紅外兩種方式進(jìn)行自動巡視檢測,這其中,用于進(jìn)行圖像處理的傳感器性能尤其重要。面臨如此寒冷的天氣,圖像處理板能否正常工作十分關(guān)鍵,因此選對圖像處理板,關(guān)系整個寒冬的電力巡檢。慧視RK3588板卡可以用于大型公共停車場。無源目標(biāo)跟蹤應(yīng)用
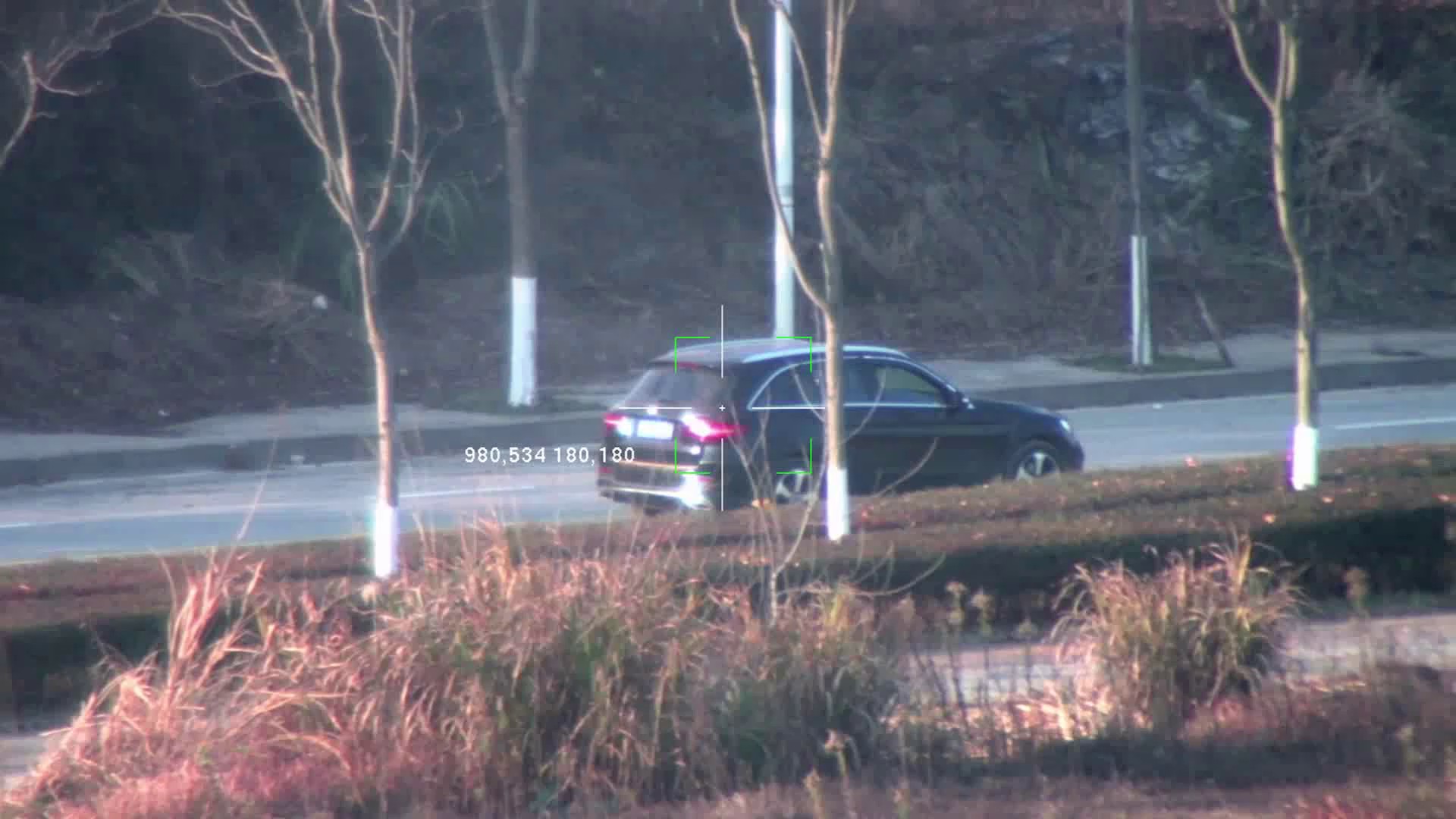
目標(biāo)跟蹤
無人機(jī)追逐識別可以用在許多領(lǐng)域,如軍備、安防。通過專業(yè)傳感器設(shè)備的植入,讓攝像頭智能化,就可以對無人機(jī)進(jìn)行追蹤識別。成都慧視作為一家深耕圖像處理領(lǐng)域的企業(yè),在這方面也有著豐富的解決經(jīng)驗(yàn)。在硬件領(lǐng)域,我們能夠定制開發(fā)不同接口的圖像處理板,如CVBS、SDI、LVDS、DVP、USB、Cameralink等,只要您提出需求,我們就能通過應(yīng)用場景需要定制合適的接口。這是進(jìn)行無人機(jī)識別的基礎(chǔ)條件。目前,成都慧視能夠提供不同等級算力的圖像處理板,RV1126、RK3399Pro、RK3588等系列,滿足多場景、廣領(lǐng)域。無源目標(biāo)跟蹤應(yīng)用Viztra-LE034圖像處理板識別概率超過85%。

隨著社區(qū)等安防向著智能化的進(jìn)一步發(fā)展,越來越多的領(lǐng)域?qū)鹘y(tǒng)意義上的視頻監(jiān)控提出了更加的嚴(yán)格要求,雖然傳統(tǒng)監(jiān)控系統(tǒng)已經(jīng)可以滿足人們“眼見為實(shí)”的要求,但同時這種監(jiān)控系統(tǒng)要求監(jiān)控人員不得不始終看著監(jiān)視屏幕,獲得視頻信息,通過人為的理解和判斷,才能得到相應(yīng)的結(jié)論,做出相應(yīng)的決策。因此,讓監(jiān)控人員長期盯著眾多的電視監(jiān)視器成了一項(xiàng)非常繁重的任務(wù)。特別在一些監(jiān)控點(diǎn)較多的情況下,監(jiān)控人員幾乎無法做到完整的監(jiān)控。
目前,采用圖像識別技術(shù)來實(shí)現(xiàn)無人機(jī)規(guī)避其他障礙物是一個有效的方法。通過在無人機(jī)上植入圖像識別模塊,這個模塊由圖像處理板和相機(jī)組合而成,通過算法的賦能,就能針對不同物體實(shí)現(xiàn)快速AI識別,然后實(shí)現(xiàn)規(guī)避。而在圖像處理板的選擇上,成都慧視開發(fā)的Viztra-LE026圖像處理板就十分合適。這塊板卡采用了RV1126開發(fā)設(shè)計(jì)而成,外形呈圓形,體積小巧,尺寸為Ф38mm*12mm,重量只有12g,用在無人機(jī)上不會過多占用空間。此外,該板卡功耗≤4W,也不會增加無人機(jī)的續(xù)航負(fù)擔(dān)。慧視光電開發(fā)的慧視AI圖像處理板,采用了國產(chǎn)高性能CPU。

無人機(jī)在農(nóng)業(yè)領(lǐng)域能夠?qū)崿F(xiàn)高效率的施肥、播種等操作。但是不同的作業(yè)環(huán)境對于無人機(jī)的工作性能要求不一樣,同樣的方案在平原地區(qū)適用,在高原地區(qū)就不行。因此針對于特殊作業(yè)環(huán)境需要制定不同的智慧化方案。像青藏高原這樣地貌復(fù)雜、低氣壓、大溫差的特點(diǎn),參與智能化工作的各個部件需要符合這樣作業(yè)環(huán)境特點(diǎn)的性能要求。不比平原的一馬平川,高原由于環(huán)境復(fù)雜,地形起伏對于無人機(jī)的飛行也需要進(jìn)行控制,無論是高度還是速度甚至距離都需要進(jìn)行嚴(yán)格限制,防止出現(xiàn)撞機(jī)等事故。因此,這個方面的智慧化建設(shè)就需要無人機(jī)具備智能避障的功能,無人機(jī)需要在高速度或者遠(yuǎn)距離的情況下識別樹木、電線桿、石頭等障礙物,并能夠?qū)崿F(xiàn)避障。慧視RV1126圖像處理板能實(shí)現(xiàn)24小時、無間隙信息化監(jiān)控。無源目標(biāo)跟蹤應(yīng)用
慧視AI板卡能夠凸顯AI的智慧之能,變被動為主動,提供多種能主動預(yù)警的視頻分析和人臉識別黑白名單管理。無源目標(biāo)跟蹤應(yīng)用
相關(guān)濾波的跟蹤算法始于2012年P(guān).Martins提出的CSK方法,作者提出了一種基于循環(huán)矩陣的核跟蹤方法,并且從數(shù)學(xué)上完美解決了密集采樣(Dense Sampling)的問題,利用傅立葉變換快速實(shí)現(xiàn)了檢測的過程。在訓(xùn)練分類器時,一般認(rèn)為離目標(biāo)位置較近的是正樣本,而離目標(biāo)較遠(yuǎn)的認(rèn)為是負(fù)樣本。回顧前面提到的TLD或Struck,他們都會在每一幀中隨機(jī)地挑選一些塊進(jìn)行訓(xùn)練,學(xué)習(xí)到的特征是這些隨機(jī)子窗口的特征,而CSK作者設(shè)計(jì)了一個密集采樣的框架,能夠?qū)W習(xí)到一個區(qū)域內(nèi)所有圖像塊的特征。無源目標(biāo)跟蹤應(yīng)用
與目標(biāo)跟蹤相關(guān)的文章

安徽移動目標(biāo)跟蹤
- 人防目標(biāo)跟蹤服務(wù)電話 2025-07-02
- 河南如何目標(biāo)跟蹤 2025-07-02
- 河南目標(biāo)跟蹤產(chǎn)品 2025-07-02
- 海南目標(biāo)跟蹤設(shè)備 2025-07-01
- 寧夏目標(biāo)跟蹤誠信推薦 2025-07-01
- 比較好的目標(biāo)跟蹤性價比 2025-07-01
- 多系統(tǒng)適配目標(biāo)跟蹤有哪些 2025-07-01
- 海南工業(yè)目標(biāo)跟蹤 2025-07-01
- 云南目標(biāo)跟蹤參考價格 2025-06-30
- 江西什么目標(biāo)跟蹤 2025-06-30
- 山東自主可控目標(biāo)跟蹤 2025-06-30
- 靠譜的目標(biāo)跟蹤哪里好 2025-06-30
與目標(biāo)跟蹤相關(guān)的產(chǎn)品


與目標(biāo)跟蹤相關(guān)的新聞
-
湖北無線目標(biāo)跟蹤 2025-06-28 07:08:17序列圖像的差異通常是運(yùn)動目標(biāo)檢測和跟蹤的出發(fā)點(diǎn),認(rèn)為目標(biāo)的運(yùn)動是圖像差異的根本原因。但是,這是建立在背景本身不運(yùn)動的前提下的。因此,在許多跟蹤系統(tǒng)中,比如車載,由于車的振動導(dǎo)致傳感器位置的變化,表現(xiàn)在圖像上就是背景的運(yùn)動,因此在做差圖像和背景自動更新之前,都必須先經(jīng)過配準(zhǔn),即讓所有圖像在都同一個坐標(biāo)...
-
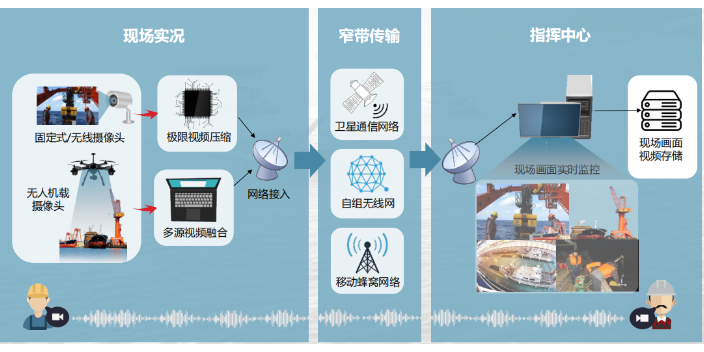
貴州自主可控目標(biāo)跟蹤 2025-06-28 10:10:38但這也遇到很多難點(diǎn),通常情況下,視頻回傳的延遲大概在200ms左右,隨著大量的彈打出,視頻傳輸所需帶寬就面臨壓力,如何在通信帶寬有限的情況下,保證視頻順暢、清晰、無卡頓地傳輸,是分析改進(jìn)這個工作需要解決的前期難點(diǎn)。針對于這個問題,慧視光電利用GS弱網(wǎng)高清音視頻傳輸系統(tǒng)和RK3588打造的Viztra...
-
湖南目標(biāo)跟蹤價格信息 2025-06-28 08:12:52目標(biāo)運(yùn)動估計(jì)是根據(jù)目標(biāo)在過去的位置對目標(biāo)的運(yùn)動規(guī)律加以總結(jié),并以此對目標(biāo)將來的運(yùn)動狀態(tài)進(jìn)行預(yù)測。正確的預(yù)測,可以縮小匹配的計(jì)算區(qū)域,大幅的降低匹配計(jì)算量。在視頻跟蹤系統(tǒng)中由于被跟蹤的目標(biāo)處于運(yùn)動狀態(tài),為了把目標(biāo)始終保持在攝像機(jī)視野之內(nèi),必須對攝像機(jī)加以控制。在實(shí)際應(yīng)用中,攝像機(jī)被固定在云臺上,云臺本...
-
四川專業(yè)目標(biāo)跟蹤 2025-06-27 08:09:20小興安嶺的日常巡護(hù),是構(gòu)筑東北生態(tài)安全的必要措施,進(jìn)入冬季,整個小興安嶺將處于冰雪覆蓋,按照傳統(tǒng)的巡檢模式,危險且費(fèi)力。整個小興安嶺森林覆蓋率達(dá)到96%,只靠肉眼的觀察,很容易錯過死角空白區(qū)的潛在危險,因此,無人機(jī)上線了。將無人機(jī)智能化,在吊艙的基礎(chǔ)上加裝具備智能圖像處理的板卡,再通過定制算法的植入...
與目標(biāo)跟蹤相關(guān)的問題
與目標(biāo)跟蹤相關(guān)的標(biāo)簽
新聞資訊
產(chǎn)品推薦
-

寧夏哪里有目標(biāo)檢測應(yīng)用
2025-07-02 -

四川軌跡圖像識別模塊產(chǎn)品
2025-07-02 -

河南高效目標(biāo)檢測
2025-07-02 -
貴州倉儲視頻壓縮與傳輸交互系統(tǒng)
2025-07-02 -
陜西國產(chǎn)目標(biāo)檢測設(shè)備
2025-07-02 -

海南目標(biāo)跟蹤設(shè)備
2025-07-01 -

黑龍江視頻目標(biāo)檢測設(shè)備
2025-07-01 -

廣東省時省力目標(biāo)檢測解決
2025-07-01 -

寧夏目標(biāo)跟蹤誠信推薦
2025-07-01