- 品牌
- 桐爾
- 型號
- AGV-01
- 廠家
- 上海桐爾
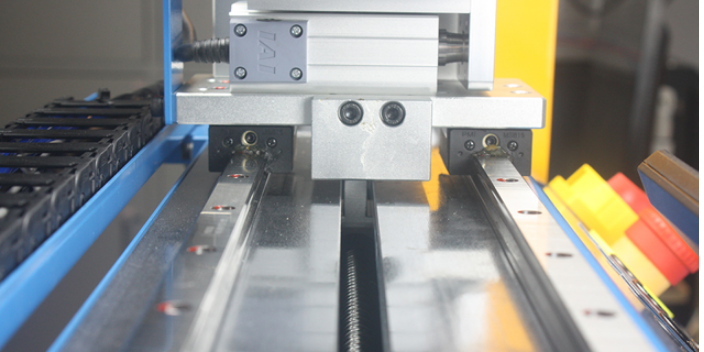
直線模組FPD行業(yè)搬運機器人飛創(chuàng)直線模組飛創(chuàng)直線模組(蘇州)有限公司自主研發(fā)的FMM系列超高速,高精度,長行程直線電機模組,可以完全改變傳統(tǒng)絲桿皮帶傳動方式的直線模組,從技術的ling先性在直線模組行業(yè)提上了一個新的里程碑。FMM超長行程直線模組在TFT、LED、OLED、AMOLED超大彩色液晶屏、顯示屏、背光屏的搬運包裝行業(yè)應用畫上了*的句號。FMM系列直線模組采用美國Parker直線電機,集成了傳感器,高性能光柵或磁柵編碼器可直接實現(xiàn)直線運動的成套產(chǎn)品,方便使用。其低摩擦使用壽命長,高性能的直線位移傳感器確保行走路徑精確、重復性能優(yōu)越。飛創(chuàng)直線模組目前致力于發(fā)展:超高速、高精度、長行程直線模組(單軸、雙軸、大理石、龍門單雙驅(qū)等)直線模組、線性模組、直線導軌滑臺模組的非標定制,可根據(jù)用戶需求定制各種行程及特殊要求的直線電機模組。飛創(chuàng)直線模組主要技術特色:1、成套產(chǎn)品2、組件性能優(yōu)越*高負載400KG行程可達60米激光干涉儀*長時可以測到80米*大速度可達6m/s*高重復定位精度±、保護環(huán)境無污染4、激光認證精度飛創(chuàng)直線模組技術參數(shù)指標:1、額定推力:308N峰值推力:1174N2、讀數(shù)頭分辨率:、重復定位精度:、行程:理論上無限。這款機器人能夠自動充電,無需人工干預。整套AGV搬運機器人用途

工區(qū)別庫卡澆鑄機器人與庫卡澆鑄機器人共鑄美好未來更多>>新聞資訊[企業(yè)動態(tài)]速凍企業(yè)迎來庫卡搬運機器人能夠在較小的占地面積范圍內(nèi)建造高效節(jié)能的全自動砌塊成型機生產(chǎn)線的構想變成現(xiàn)實。碼垛機器人的工作原理是:平板上工件符合棧板要求的一層工件,平板及工件向前移動直至棧板垂直面。上方擋料桿下降,另三方定位擋桿起動夾緊,此時平板復位。各工件下降到棧板平面,棧板平面與平板底面相距10mm,棧板下降一個工件高度。往復上述直到棧板堆碼達到設定要求。碼垛機器人配備有特殊定制設計的多功能抓取器,不管包裝箱尺寸或重量如何,機器人都可以使用真空吸盤牢固地夾持和傳送包裝箱。碼垛機器人程序的使用步驟是怎樣的?碼垛機器人是現(xiàn)在常見的自動化機械,可以安置在流水線的末端,對貨物進行碼放。企業(yè)在使用碼垛機的時候需要注意按照操作規(guī)程來,不然出現(xiàn)問題可能售后服務可能受到影響。技術人員指出,在出廠手冊中有詳細的記錄。碼垛機器人是生產(chǎn)中必不可少的應用設備,不過機器人碼垛程序使用方法并不是很難,只要接通碼垛機動力電源,然后打開氣源閥門,再將操作盤上的鑰匙開關接通,確認操作盤及現(xiàn)場的急停開關均放開,升降機配重安全銷已拔出。臺式AGV搬運機器人廠家現(xiàn)貨AGV搬運機器人 是適應多載重需求的搬運。

豎板3對貨物的后方進行防護,來自各個方位的防護,可有效避免貨物在搬運過程中出現(xiàn)掉落情況,通過底座1、萬向輪2、豎板3、空心槽4、伸縮桿5、承載板6、擠壓頭7、壓力傳感器8、處理器9、壓縮彈簧10、活動桿11、側(cè)護桿12、安裝座13和***液壓桿14的設置,使得該機器人具備可以對貨物進行防護的***,解決了目前的機器人在進行搬運操作時仍存在一定缺陷,一旦機器人行進過程中遇到碰撞或地平面障礙時,很容易造成貨物掉落的問題。工作原理:貨物從三棱座15表面的活動輥16上入底座1的頂部,在貨物接觸承載板6時,由于其自身重力,會將承載板6向空心槽4的內(nèi)部壓動,伸縮桿5被壓收縮,壓縮彈簧10被擠壓,承載板6帶動擠壓頭7對壓力傳感器8造成擠壓,此時壓力傳感器8檢測到壓力信息,隨后將數(shù)據(jù)傳遞至處理器9,處理器9控制***液壓桿14和第二液壓桿22啟動并伸長,***液壓桿14將限位框17向上帶動并帶動側(cè)護桿12運動,由于活動桿11的連接關系,隨著側(cè)護桿12的運動,活動桿11會被逐漸帶動至與底座1垂直,第二液壓桿22通過連接板23和斜桿24帶動槽板21向前方運動,槽板21在橫桿20的表面向前方滑動,直至斜桿24運動至橫桿20的上方時,槽板21會以橫桿20為軸轉(zhuǎn)動至與底座1表面垂直。
工廠內(nèi)部物料運輸主要依靠人工推車完成,不僅耗時耗力,還容易出現(xiàn)差錯。從去年9月開始,工廠引進了20臺AGV搬運機器人。這些機器人采用先進的激光導航技術,可24小時不間斷工作,精細完成各工位間的物料配送任務。在剛剛結束的一個工期,產(chǎn)線工作人員對之前未引入AGV搬運機器人與引入AGV搬運機器人后的各工作數(shù)據(jù)做了一個詳細對比,數(shù)據(jù)顯示物料周轉(zhuǎn)時間縮短40%,生產(chǎn)等待時間有效減少;人工成本降低25%,大量人力資源釋放;產(chǎn)品質(zhì)量提升15%,人為失誤大幅減少;整體生產(chǎn)效率提升30%,產(chǎn)能***提高。工廠負責人表示:“引入AGV機器人是我們邁向智能制造的重要一步。它不僅提高了效率,還為員工創(chuàng)造了更好的工作環(huán)境。未來我們將繼續(xù)加大智能化投入,打造行業(yè)AGV好工廠。 這款機器人能夠與其他自動化設備無縫對接,提升協(xié)同效率。

在核電站和利用核輻射進行保鮮儲存的場所,AGV用于物品的運送,避免了危險的輻射。在膠卷和膠片倉庫,AGV可以在黑暗的環(huán)境中,準確可靠的運送物料和半成品。米克力美開發(fā)的AGV搬運機器人已經(jīng)投入兵器維護和礦山實際應用。餐飲服務業(yè):未來在服務業(yè)AGV小車也有望大展身手,如餐廳傳菜上菜端茶遞水等基礎勞動都可以有由AGV搬運機器人來實現(xiàn)。食品醫(yī)*業(yè):對于搬運作業(yè)有清潔、安全、無排放污染等特殊要求的醫(yī)*、食品、化工等行業(yè)中,AGV的應用也受到重視。在國內(nèi)的許多卷*企業(yè),如青島頤中集團、玉溪紅塔集團、紅河卷*廠、淮陰卷*廠,應用激光引導式AGV完成托盤貨物的搬運工作。AGV搬運機器人AGV的安全考慮編輯在AGV系統(tǒng)安裝之前就必須考慮安全問題。目標是兩個,一是防止車輛之間或者車輛與人員的碰撞,第二是當防撞系統(tǒng)故障時,主安全設備要立即使該車停止,等待人工干預再**。安全系統(tǒng)必須在系統(tǒng)安裝的初期就要就位。安全設備可以分為固定設備和移動設備。固定設備通常組成所謂系統(tǒng)級的部件。包括阻塞系統(tǒng),和設備的布局。移動設備包括車輛,必須遵循一系列的規(guī)則,如載重量,重心,車速等等。在使用AGV系統(tǒng)之前,用戶必須對安全系統(tǒng)的使用進行培訓。AGV搬運機器人 是實時監(jiān)控下的智能搬運者。附近哪里有AGV搬運機器人哪家好
AGV搬運機器人 是生產(chǎn)線上的靈活搬運者。整套AGV搬運機器人用途
圖中:1底座、2萬向輪、3豎板、4空心槽、5伸縮桿、6承載板、7擠壓頭、8壓力傳感器、9處理器、10壓縮彈簧、11活動桿、12側(cè)護桿、13安裝座、14***液壓桿、15三棱座、16活動輥、17限位框、18活動輪、19支撐桿、20橫桿、21槽板、22第二液壓桿、23連接板、24斜桿。具體實施方式下面將結合本實用新型實施例中的附圖,對本實用新型實施例中的技術方案進行清楚、完整地描述,顯然,所描述的實施例**是本實用新型一部分實施例,而不是全部的實施例。基于本實用新型中的實施例,本領域普通技術人員在沒有做出創(chuàng)造性勞動前提下所獲得的所有其他實施例,都屬于本實用新型保護的范圍。請參閱圖1-3,一種防掉落的自動化搬運機器人,包括底座1,底座1底部的四角均栓接有萬向輪2,底座1頂部的后方栓接有豎板3,底座1頂部的后方開設有空心槽4,空心槽4內(nèi)腔底部的兩側(cè)均栓接有伸縮桿5,伸縮桿5的頂端固定安裝有承載板6,承載板6底部的中心處固定連接有擠壓頭7,擠壓頭7的下方設置有壓力傳感器8,壓力傳感器8與空心槽4的內(nèi)壁之間固定安裝,壓力傳感器8的左側(cè)設置有處理器9,承載板6底部的兩側(cè)均焊接有壓縮彈簧10,底座1頂部的兩側(cè)均鉸接有活動桿11,活動桿11的頂端鉸接有側(cè)護桿12。整套AGV搬運機器人用途
工區(qū)別庫卡澆鑄機器人與庫卡澆鑄機器人共鑄美好未來更多>>新聞資訊[企業(yè)動態(tài)]速凍企業(yè)迎來庫卡搬運機器人能夠在較小的占地面積范圍內(nèi)建造高效節(jié)能的全自動砌塊成型機生產(chǎn)線的構想變成現(xiàn)實。碼垛機器人的工作原理是:平板上工件符合棧板要求的一層工件,平板及工件向前移動直至棧板垂直面。上方擋料桿下降,另三方定位擋桿起動夾緊,此時平板復位。各工件下降到棧板平面,棧板平面與平板底面相距10mm,棧板下降一個工件高度。往復上述直到棧板堆碼達到設定要求。碼垛機器人配備有特殊定制設計的多功能抓取器,不管包裝箱尺寸或重量如何,機器人都可以使用真空吸盤牢固地夾持和傳送包裝箱。碼垛機器人程序的使用步驟是怎樣的?碼垛...
- 制造AGV搬運機器人是什么 2025-07-08
- 工程AGV搬運機器人拆裝 2025-07-08
- 自動AGV搬運機器人優(yōu)勢 2025-07-08
- 自動AGV搬運機器人常見問題 2025-07-07
- 半自動AGV搬運機器人報價 2025-07-07
- 附近哪里有AGV搬運機器人產(chǎn)品介紹 2025-07-01
- 大型AGV搬運機器人廠家 2024-09-02
- 多功能AGV搬運機器人維保 2024-08-30
- 國產(chǎn)AGV搬運機器人維保 2024-08-29
- 智能AGV搬運機器人售后服務 2024-08-29


- 臺式AGV搬運機器人性能 2024-08-26
- 常規(guī)AGV搬運機器人發(fā)展 2024-08-23
- 大型AGV搬運機器人售后服務 2024-08-22




- 河西區(qū)自動化超景深顯微鏡 07-14
- 新疆自動超景深顯微鏡 07-14
- 河北區(qū)智能超景深顯微鏡 07-11
- 新疆哪里有超景深顯微鏡 07-11
- 除金搪錫搪錫機 07-11
- 南京工業(yè)全自動半鋼電纜成型系統(tǒng)報價行情 07-11
- 湖南自動化超景深顯微鏡 07-11
- 杭州超景深顯微鏡哪家好 07-11
- 天津超景深顯微鏡報價 07-11
- 上海智能芯片引腳整形機哪家好 07-09