目前我們提供了多種多套的光伏清洗產品,隨著光伏的清洗,***批建立的光伏電站光伏設備已需要全面清洗目前行業發展非常迅速不光電廠需要自己維護,許多國企是找保潔公司來完成清洗,市面上出現了大量的光伏運維公司,項目就是清洗全國的光伏清洗項目,人工干洗光伏板這種光伏太陽能板清洗方式是較直觀且清洗效果較好、干凈的方法。但是,清洗操作空間較危險。采用長柄絨拖清理組件表面浮塵配合**洗塵劑進行清洗,主要原理:利用靜電吸附原理,具有吸附灰塵和沙粒的作用,增強塵推吸塵去污能力,能有效地避免在清掃時的灰塵沙粒飛揚。人工干洗光伏板的缺點:不同操作工的力量不同,對組件造成的壓力不同,會使得組件變形過大,造成電池片隱裂,另外一個缺點是,干洗組件效果不佳,常常因拖把沾有過多灰塵,在組件表面上留有部分痕跡,造成大面積陰影遮擋。光伏清掃機器人具有自主避障功能,可避免與障礙物發生碰撞,確保機器人和光伏板的安全。吉林光伏清洗機器人

光伏板請否要清洗?其實邏輯很簡單,有沒有前景實際上在問市場上是不是有需求一個沒有需求,不被需要的物品肯定是不被需要的那么這個問題顯而易見就是在問光伏行業是不是有前景,同時也要搞清光伏板是不是需要清洗,據統計,2020年上半年全國新增光伏發電裝機1152萬千瓦,其中集中式光伏新增裝機708.2萬千瓦,分布式光伏新增裝機443.5萬千瓦。從累計情況來看,截止6月底,光伏發電累計裝機達到2.16億千瓦,其中集中式光伏1.49億千瓦,分布式光伏6707萬千瓦。從新增裝機布局來看,華北、華東地區新增裝機較多,分別達439和219萬千瓦。
山西智能清洗機器人通過定時、定點的清理,光伏清掃機器人可以保持光伏板的清潔,提高光伏系統的性能表現.

自主導航技術可以應用于各種類型的移動機器人,包括地面機器人、無人機、水下機器人等。這些機器人都可以通過配備相應的傳感器和導航算法來實現自主導航和定位。此外,自主避障技術也可以應用于其他類型的機器人,以避免在運行過程中發生碰撞或損壞。這些機器人可以配備多種傳感器,如激光雷達、攝像頭、超聲波傳感器等,以感知周圍的障礙物信息。但是,不同的機器人任務和環境可能需要不同的技術組合和優化。因此,在應用這些技術時,需要根據具體的情況進行選擇和定制。
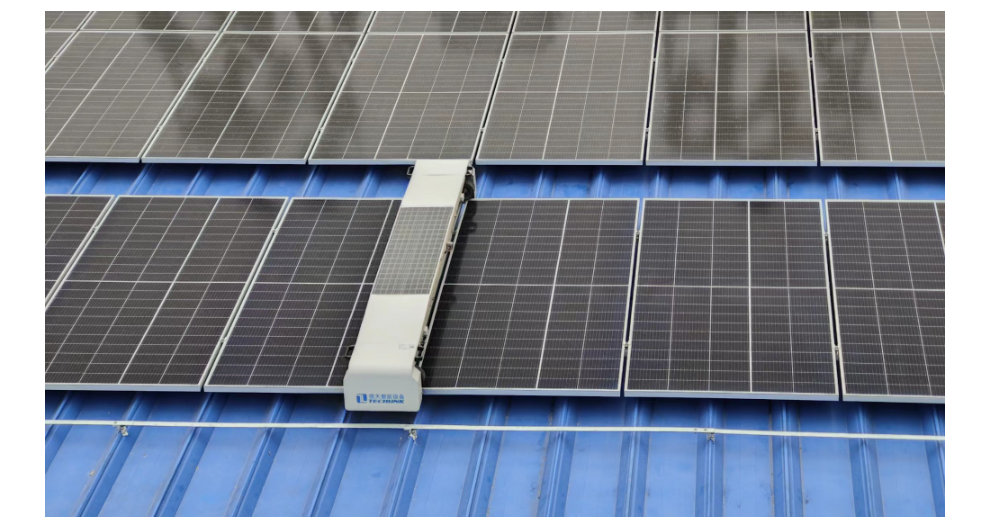
目前清掃機器人滲透率應該不超過5%,通過一些客戶的走訪,公司發現使用機器人的客戶還是很少,更多的還是定期的雇傭人工打掃面板。因為批的土地也越來越少,對單位面積發電量有了更高的要求,所以對清掃機器人的需求是明顯上升的。2、光伏清洗機器人應用的區域,主要看場地的平整度,如果成本下降了,分布式應用的也會比較多,像工廠的屋頂都可以用,因為投入是一次性的,做了轉接以后可以實現轉彎,我們也在客戶的現場看到了。機器人行走的路徑不局限于直行,環行也是可以的,在屋頂上就可以轉彎了。未來可以通過一定的設計研發,擴寬更多的應用場景。
通過定時,定點的清理,光伏清掃機器人能保持光伏板的清潔,提高光伏系統的性能表現。

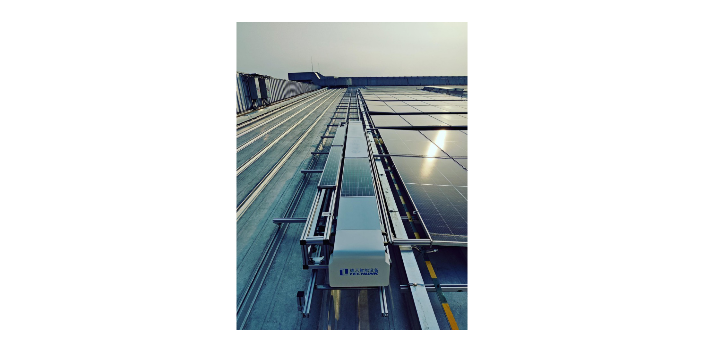
大型地面電站清洗模式針對大型地面電站應用,一臺擺渡車機器人可搭載多臺清潔機器人,擺渡車機器人在各陣列間轉移清潔機器人,解決了清潔機器人跨行列工作的問題,實現了機器人的比較大化利用,晝夜均可自動運行,日清洗力達5MWp。針對分布式屋頂電站裝機容量相對較小的特點,也可以采用擺渡車機器人,一臺清掃機器人搭配一臺擺渡車,可以時間光伏電站的多排清掃,遠程控制,無需人工介入,人工1天的工作量,機器人1小時就可以搞定了。
光伏清掃機器人的智能控制系統能夠記錄清潔過程和光伏板的狀態,為后續維護提供數據支持.青海光伏運維機器人報價表
光伏清掃機器人配備智能感知技術,可通過紅外線,攝像頭等傳感器實時監測光伏板的溫度和狀態。吉林光伏清洗機器人
做好光伏板清掃機器人發展前景預測,需把握預測的四個基本要素:1、信息。信息是客觀事物特性和變化的表征和反映,存在于各類載體,是光伏板清掃機器人預測的主要工作對象、工作基礎和成果反映。2、方法。方法是指在預測的過程中進行質和量的分析時所采用的各種手段。預測的方法按照不同的標準可以分成不同的類別。按照光伏板清掃機器人預測結果屬性可以分為定性預測和定量預測,按照預測時間長短的不同,可以分為長期預測、中期預測和短期預測。按照方法本身,更可以分成眾多的類別,基本的是模型預測和非模型預測。吉林光伏清洗機器人