功能與性能問題功能不匹配:軟件的功能與實驗臺的實際需求不匹配,無法充分發揮實驗臺的性能。例如,軟件沒有提供實驗臺所需的特定運動操控功能,或者軟件的操控邏輯與實驗臺的硬件結構不匹配,導致機器人無法完成預期任務。性能瓶頸:軟件的算法復雜度較高,而實驗臺的硬件性能有限,會導致軟件運行緩慢,影響機器...
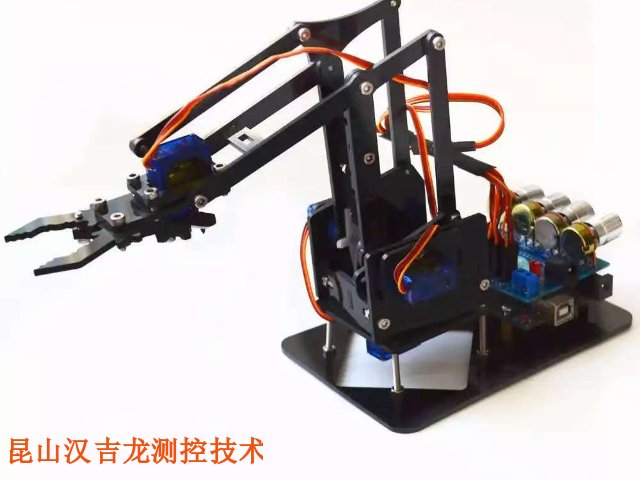
自動化智能機器人實驗臺基本參數
- 品牌
- VALENIAN/瓦倫尼安
- 型號
- VT-ZP500
- 類型
- 自動化實訓臺
- 加工定制
- 是
- 用途
- 教學實訓
- 電機功率
- 2
- 外形尺寸
- 1200X1000X1500
- 重量
- 10
- 產地
- 蘇州
- 廠家
- 昆山漢吉龍測控技術有限公司
自動化智能機器人實驗臺企業商機
依據數據特點數據類型:如果是數值型數據,像傳感器采集的溫度、壓力、速度等數據,可選擇數值計算類算法,如均值濾波、卡爾曼濾波用于數據處理,回歸分析用于預測。若是圖像、視頻等非結構化數據,就需要采用如卷積神經網絡等專門處理此類數據的算法進行特征提取和分析。數據量:對于少量數據,簡單的統計分析算法、基于規則的算法可能就足夠,如通過設定閾值判斷機器人狀態是否異常。當數據量龐大時,像深度學習算法中的循環神經網絡(RNN)及其變體LSTM等,能利用大量數據進行訓練學習,挖掘數據中的復雜模式和規律。數據噪聲:若數據噪聲較大,需要先采用濾波算法進行去噪,如中值濾波、小波濾波等。對于存在隨機噪聲且具有動態特性的數據,卡爾曼濾波能濾除噪聲,實現對機器人狀態的準確估計。自動化智能機器人實驗臺能耗大嗎?ABB自動化智能機器人實驗臺怎么用

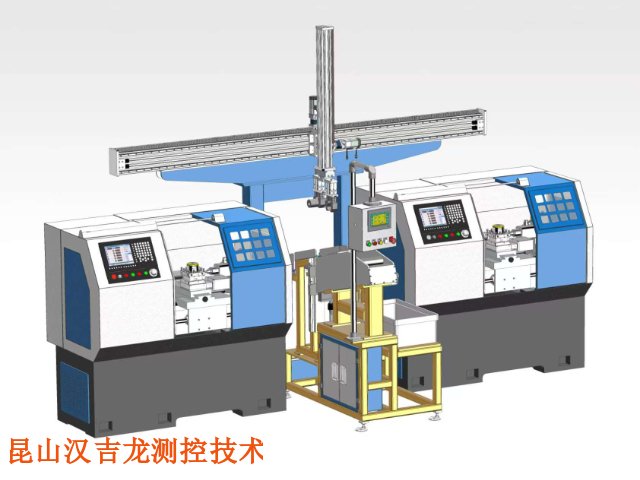
自動化智能機器人實驗臺具有多方面的優勢,主要體現在高度集成化、自主化、可擴展性等方面,以下是詳細介紹:高度集成化多系統整合:將機械結構、系統、傳感器系統、動力系統等多個關鍵部分集成于一體,為機器人的研發和測試提供了一個完整的平臺,使研究人員能夠方便地對各個系統進行協同調試和優化。空間緊湊:采用緊湊的設計理念,合理布局各個組件,在有限的空間內實現了豐富的功能,節省了實驗場地,便于在不同的實驗環境中靈活部署。高度自動化自動執行任務:能夠按照預設的程序和指令自動完成各種實驗任務,如機器人的自主導航、目標識別與抓取等,減少了人工操作的繁瑣和誤差,提高了實驗效率和準確性。實時監控與反饋:配備了監控系統,可實時監測機器人的運行狀態和各項參數,如電機轉速、傳感器數據等,并根據預設的條件自動進行反饋調整,確保實驗過程的穩定性和可靠性。 皮帶輸送自動化智能機器人實驗臺制造商新型自動化智能機器人實驗臺有哪些新優勢呢?

VALENIAN自動化智能機器人實驗臺影響服務質量的因素品牌與廠家實力:**品牌和實力較強的廠家通常會有更完善的售后服務體系。如ABB、歐姆龍等大品牌,在全球或范圍內設有多個服務點,有的售后服務團隊和充足的資源支持4。地域因素:如果用戶所在地區有廠家的服務網點或授權維修中心,那么在獲取售后服務時會更加便捷,響應時間和維修效率都會更高。但對于一些偏遠地區,可能服務響應時間會較長。產品復雜程度:自動化智能機器人實驗臺的功能和技術越復雜,售后服務的難度和成本也會相應增加。對于這類產品,廠家需要配備更技術人員,售后服務的質量可能會受到技術人員水平和數量的影響。建立了完善的零配件供應鏈管理體系,確保常用配件有充足的庫存,當實驗臺的零部件出現損壞時。
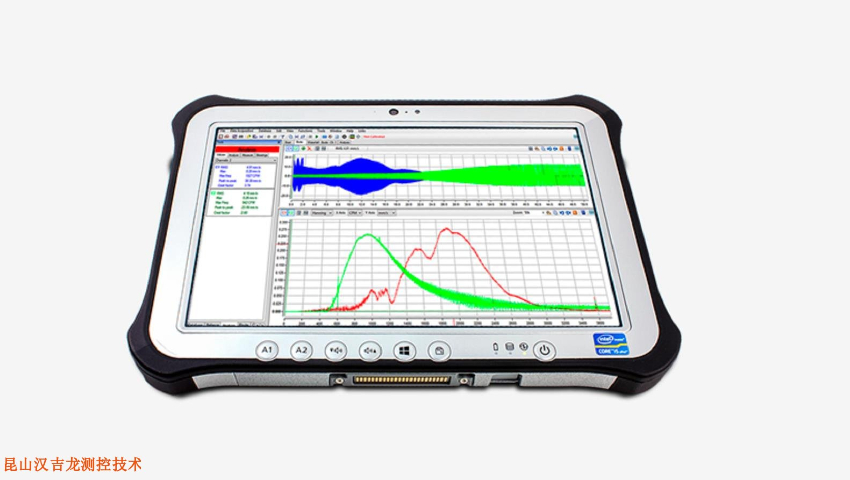
自動化智能機器人實驗臺是一種集成了多種技術,用于開展機器人相關實驗和研究的設備平臺,以下是其相關介紹:功能特點多任務操作功能:可進行如樣品處理、搬運、裝配等多種操作任務。例如在一些生命科學實驗室的自動化智能機器人實驗臺中,機器人能夠自動完成樣品的分揀、移液、混合等操作123。高精度運動操控:借助高精度的電機、減速器和操控系統,實現精確的位置操控和軌跡,確保機器人在操作過程中的準確性和穩定性。比如在機械加工實驗中,能精確操控機械臂完成高精度的零件加工任務。傳感器集成與感知:配備多種傳感器,如視覺傳感器、力傳感器、觸覺傳感器等,使其能夠感知周圍環境信息。如在物流倉儲實驗中,通過視覺傳感器識別貨物的形狀、位置和顏色等,實現準確的貨物分揀和搬運。智能操控與編程:通常采用智能操控系統,支持多種編程方式,如圖形化編程、代碼編程等,方便用戶根據實驗需求對機器人進行編程和操控。還能結合人工智能算法,實現自主學習、路徑規劃、任務優化等智能功能。數據采集與分析:可以實時采集機器人運行過程中的各種數據,如位置、速度、力等,并進行數據分析和處理,為實驗研究提供數據支持。比如在機器人性能測試實驗中。自動化智能機器人實驗臺優勢在哪呢?

實驗任務與運行時間方面任務復雜度:執行復雜任務的實驗臺能耗通常更大。例如,機器人進行連續的高速運動、頻繁的高精度操作任務,或者同時運行多個復雜的算法,如實時目標識別與路徑規劃算法,會使電機、傳感器和計算設備等都處于高負荷工作狀態,從而消耗更多的能量。運行時間:實驗臺運行時間越長,能耗自然越高。如果是進行長時間不間斷的實驗,如持續24小時甚至更長時間的可靠性測試實驗,相比短時間的功能驗證實驗,能耗會***增加。能源管理與優化措施方面節能設計:一些實驗臺采用了節能設計,如具有能量回收系統的機器人關節驅動裝置,能在機器人運動過程中回收部分能量并轉化為電能重新利用,降低能耗。另外,采用智能電源管理系統,能根據設備的工作狀態自動調整電壓和頻率,也有助于節能。優化算法:通過優化機器人的算法,使機器人的運動更加、合理,避免不必要的能量消耗。例如,采用比較好路徑規劃算法可以減少機器人的運動距離和時間,從而降低電機能耗;優化傳感器的工作模式,使其在滿足實驗需求的前提下,盡可能減少工作時間和功率消耗。 自動化智能機器人實驗臺的發展趨勢是什么呢?ABB自動化智能機器人實驗臺怎么用
自動化智能機器人實驗臺廠家?ABB自動化智能機器人實驗臺怎么用
軌跡規劃與優化方面模型預測操控算法(MPC):通過建立機器人的運動模型,預測機器人在未來一段時間內的運動軌跡,然后在每個操控周期內,基于預測結果和當前狀態,優化計算出**優的操控輸入序列,使機器人沿著**接近理想的軌跡運動,從而提高軌跡精度,減少運動偏差。基于樣條曲線的軌跡規劃算法:如采用B樣條曲線等方法進行軌跡規劃,可生成平滑、連續的運動軌跡,避免軌跡中的不連續點或突變,減少機器人在運動過程中的沖擊和振動,保證機器人能夠精確地按照預設軌跡運動,提高操作的平穩性和精度。增強系統魯棒性方面滑模操控算法:在系統狀態空間中定義一個滑動面,使系統在受到外部干擾或模型不確定性影響時,能迅速調整到滑動面上并保持在滑動面上運動,對系統的參數變化和外部干擾具有很強的魯棒性,確保機器人在復雜的實驗環境或存在干擾的情況下,仍能保持較高的操作精度。魯棒操控算法:設計時充分考慮了系統模型的不確定性和可能存在的外部干擾,通過優化操控參數和結構,使系統在各種不確定因素下都能保持穩定的性能,保證機器人的運動精度不受影響,提高實驗臺在不同工況下的可靠性和準確性。 ABB自動化智能機器人實驗臺怎么用
與自動化智能機器人實驗臺相關的文章

電機自動化智能機器人實驗臺設備
- 預測性自動化智能機器人實驗臺保修 2025-03-01
- 漢吉龍自動化智能機器人實驗臺系統 2025-02-28
- ABB自動化智能機器人實驗臺用途 2025-02-27
- 漢吉龍自動化智能機器人實驗臺服務 2025-02-27
- 設備自動化智能機器人實驗臺公司 2025-02-27
- 國產自動化智能機器人實驗臺價格 2025-02-26
- 非標型自動化智能機器人實驗臺系統 2025-02-26
- 實物自動化智能機器人實驗臺怎么做 2025-02-24
- 多功能自動化智能機器人實驗臺企業 2025-02-23
- VALENIAN自動化智能機器人實驗臺 2025-02-22
- 漢吉龍自動化智能機器人實驗臺廠家 2025-02-17
- 江蘇自動化智能機器人實驗臺貼牌 2025-02-17
與自動化智能機器人實驗臺相關的產品

與自動化智能機器人實驗臺相關的新聞
-
PLC自動化智能機器人實驗臺廠家排名 2025-02-09 04:06:23自動化智能機器人實驗臺是一種用于開展智能機器人相關實驗和研究的設備平臺,以下是關于它的一些介紹:功能運動操控功能:可實現機器人的移動、關節運動等基本動作操控,通過編程設定機器人的運動軌跡、速度、加速度等參數,如讓機械臂按照特定路徑抓取和放置物體,或使移動機器人在設定區域內自主導航。感知功...
-
自動生產線自動化智能機器人實驗臺裝置 2025-02-06 14:06:48機械結構與材料方面高精度機械設計與制造:為滿足機器人的高精度運動和操作要求,實驗臺的機械結構需要具備高精度的加工和裝配工藝。例如,機器人手臂的關節精度、導軌的直線度和平行度等都對實驗操作精度有直接影響,制造過程中的微小誤差可能會在實驗中被放大,導致實驗結果不準確。材料性能與適應性:實驗環...
-
6軸自動化智能機器人實驗臺批發 2025-02-05 16:08:15安全與穩定性問題安全漏洞:軟件可能存在安全漏洞,容易受到網絡,從而影響實驗臺的正常運行,甚至導致機器人失控等安全。例如,***可能通過軟件漏洞入侵實驗臺系統,篡改機器人的指令。穩定性問題:軟件可能存在內存泄漏、程序崩潰等穩定性問題,影響實驗的正常進行。例如,長時間運行軟件后,由于內存泄漏導致...
-
氣路連接自動化智能機器人實驗臺設備 2025-01-27 02:07:16合作與資源共享產學研合作:與高校、科研機構合作,利用其科研資源和人才優勢,共同開展研發工作。高校和科研機構可能擁有實驗設備和技術,通過合作可以降低企業的研發成本。行業內合作:與同行企業或相關企業合作,共享技術、資源和經驗。例如,多家企業可以共同建設一個公共的機器人實驗平臺,實現資源共享。...
與自動化智能機器人實驗臺相關的問題
與自動化智能機器人實驗臺相關的標簽
新聞資訊
產品推薦
-
福建俄羅斯激光對中儀
2025-07-11 -

湖南設備激光對中儀
2025-07-11 -

瑞典激光對中儀器寫論文
2025-07-11 -

專業級激光對中儀器保養
2025-07-11 -

在線激光對中儀定制
2025-07-11 -

無錫激光對中儀怎么用
2025-07-11 -

國產激光對中儀器定做
2025-07-11 -

軸激光對中儀操作
2025-07-11 -
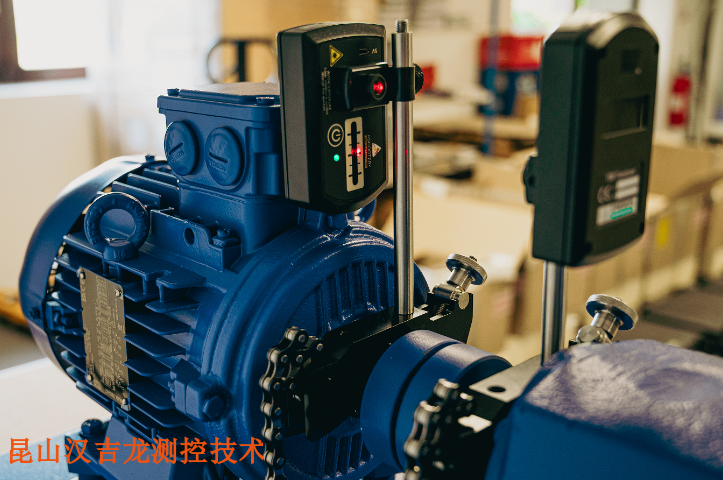
吉林旋轉機械激光對中儀
2025-07-11