
無人機能夠通過高空拍攝快速獲取大范圍、多角度的地面信息。但是傳統的攝像頭只能獲取視頻數據,對于許多需要進行數據分析的行業來說顯然不夠智能化,從無人機視頻數據中快速獲取提煉大量有價值的信息,不僅能夠提升工作效率,還能夠減少不小的成本支出。這就是無人機的AI識別能力。通過識別算法,在無人機工作時就對目標...
圖像識別模塊基本參數
- 品牌
- 慧視科技
- 型號
- 可定制
- 輸出信號
- 數字型,可定制
- 制作工藝
- 集成,薄膜,陶瓷,可定制
- 材質
- 可定制
- 材料物理性質
- 導體,可定制,磁性材料
圖像識別模塊企業商機
巡檢機器人能夠實現抵近待測設備,進行精細的測溫、測量以及感應。同時具備自主導航、實時避障功能,能夠智能規劃比較好巡檢路徑、規避站內檢修區域,效率是人工的好幾倍,并且還不會出現傳統人工巡檢造成人身危害等行為。這種機器人搭載的圖像處理板可以自由選擇,例如成都慧視開發的Viztra-HE030圖像處理板,就可以很好的應用在電力巡檢領域,這塊板卡采用了瑞芯微全新一代旗艦芯片RK3588,采用8nmLP制程,四大四小八核處理器;搭載八核64位CPU,主頻高達2.4GHz;集成ARMMali-G610MP4四核GPU,內置AI加速器NPU,算力高達6.0TOPS。用在電力巡檢領域完全可以滿足需求,并且成都慧視可以根據使用場景進行外殼的特殊化定制,有效處理散熱防水,為機器人的戶外工作提供更加穩定的處理能力。圖像識別模塊監控預警系統是防溺水技防手段中應用比較廣的。吉林RK3399Pro開發板圖像識別模塊高性能主板
圖像識別模塊
深度學習是機器學習的一個分支,只在近十年內才得到廣泛的關注與發展。它與機器學習不同的,它模擬我們人類自己去識別人臉的思路。比如,神經學家發現了我們人類在認識一個東西、觀察一個東西的時候,邊緣檢測類的神經元先反應比較大,也就是說我們看物體的時候永遠都是先觀察到邊緣。就這樣,經過科學家大量的觀察與實驗,總結出人眼識別的模式是基于特殊層級的抓取,從一個簡單的層級到一個復雜的層級,這個層級的轉變是有一個抽象迭代的過程的。深度學習就模擬了我們人類去觀測物體這樣一種方式,首先拿到互聯網上海量的數據,拿到以后才有海量樣本,把海量樣本抓取過來做訓練,抓取到重要特征,建立一個網絡,因為深度學習就是建立一個多層的神經網絡,肯定有很多層。有些簡單的算法可能只有四五層,但是有些復雜的,像剛才講的谷歌的,里面有一百多層。當然這其中有的層會去做一些數學計算,有的層會做圖像預算,一般隨著層級往下,特征會越來越抽象。遼寧RK3399Pro主板圖像識別模塊軟件開發慧視RK3399圖像處理板能實現24小時、無間隙信息化監控。

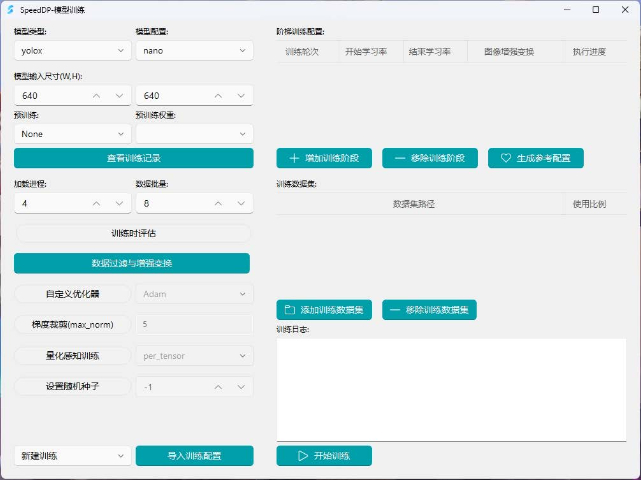
AI的出現可以很好地解決這個問題。針對于這樣的環境需求,成都慧視推出了基于瑞芯微平臺的深度學習算法開發平臺SpeedDP,它是一款入門級的AI開發平臺,提供從數據標注、模型訓練、測試驗證到RockChip嵌入式硬件平臺模型部署的可視化AI開發功能,提供豐富的算法參數設置接口,滿足不同用戶業務場景的定制化需求。經過前期的需求分析,大量的數據訓練,SpeedDP就能夠生成適合行業需求的訓練模型,通過這個模型,就能不斷進行自動化的圖像標注。
管人員遠程操控無人機在道路上空進行巡飛,就能夠發現哪條路上有違停車輛。相較于傳統治理,無人機擁有更高視野及機動性。在提前規劃無人機航線后,“自動機場”內部署的無人機會定時進行空中巡視,一旦發現違停車輛即開展圖像取證。隨后,后臺系統將實時推送違停提示短信至車主,提醒其在10分鐘內駛離。對于規定時間內未駛離的車輛,系統將通知附近的警力趕赴現場,二次取證并進行整治。這個過程中,可以利用無人機吊艙進行輔助,吊艙的使用能夠進一步提升效率。例如成都慧視開發的VIZ-GT07D微型三軸雙光慣性穩定吊艙,吊艙集成了640×512高分辨率紅外相機、1300萬像素的全高清可見光相機和陀螺穩定平臺。當發現違停車輛時,無需抵近,即便是夜間也能夠通過變焦放大就能夠對車輛進行信息取證。遠海牧場監控可以加裝慧視RK3399圖像處理板。
無人機作為高空巡邏偵查的輔助平臺,憑借其靈活、廣闊的視野,能夠為治安巡邏提供更多的地面信息,有效彌補視野盲區,實現三位一體防控。例如公安可以通過無人機開展“空中喊話”,將反詐、防溺水、消防安全等知識“空投”給市民,開展“空中喊話”。在高空喊話的同時,無人機還將現場巡檢畫面實時傳回情指中心聯合指揮大廳,民警將巡航檢查發現的小區消防通道堵塞、居民樓飛線充電等隱患,迅速派發至屬地職能單位予以整改。這種模式下,需要無人機搭載吊艙來實現相應功能。成都慧視推出的VIZ-GT07D三軸雙光微型吊艙就是一個不錯的選擇。這款吊艙是一款微型的三軸雙光慣性穩定吊艙,集成了640×512高分辨率紅外相機、1300萬像素的全高清可見光相機和陀螺穩定平臺,能夠實現夜間和白天24小時的無人機巡邏工作。RK3399圖像處理板是我司自主研發的圖像識別模塊板,該板卡采用國產高性能CPU。河南圖像識別模塊算法定制
高精度的圖像識別可以用成都慧視開發的RK3588圖像處理板。吉林RK3399Pro開發板圖像識別模塊高性能主板
圖像識別技術在可以被廣泛應用之前,一個重要的挑戰是,怎樣才能知道一個模型對未曾出現過的場景仍然具有很好的泛化能力。在目前的實踐中,數據集被隨機劃分為訓練集和測試集,模型也相應地在這個數據集上被訓練和評估。需要注意的是,在這種做法中,測試集擁有和訓練集一樣的數據分布,因為它們都是從具有相似場景內容和成像條件的數據中采樣得到的。然而,在實際應用中,測試圖像或許會來自不同于訓練時的數據分布。這些未曾出現過的數據可能會在視角、大小尺度、場景配置、相機屬性等方面與訓練數據不同。慧視光電推出的深度學習算法開發平臺SpeedDP就能夠通過不斷的訓練,達到快速圖像標注的目的,讓AI能夠更加精確的識別目標。吉林RK3399Pro開發板圖像識別模塊高性能主板
與圖像識別模塊相關的文章

河北圖像識別模塊技術
- 安徽視覺算法圖像識別模塊接口豐富 2025-07-11
- 江西RK3399處理板圖像識別模塊軟件開發 2025-07-10
- 山西邊海防圖像識別模塊定制方案 2025-07-07
- 甘肅自主研發圖像識別模塊廠家 2025-07-07
- 山西RK3399Pro開發板圖像識別模塊電子元器件 2025-07-07
- 云南RK3399開發板圖像識別模塊軟件開發 2025-07-06
- 河南人流圖像識別模塊提供商 2025-07-06
- 遼寧自主研發圖像識別模塊專業 2025-07-05
- 湖北自主研發圖像識別模塊提供商 2025-07-05
- 貴州運動圖像識別模塊平臺 2025-07-05
- 貴州人臉識別圖像識別模塊解決方案 2025-07-05
- 貴州RK3399開發板圖像識別模塊軟件開發 2025-07-05
與圖像識別模塊相關的產品


與圖像識別模塊相關的新聞
-
甘肅RK3399主板圖像識別模塊算法研發 2025-06-26 00:12:49SpeedDP作為一個服務型AI平臺,它能提供從數據標注、模型訓練、測試驗證到RockChip嵌入式硬件平臺模型部署的可視化AI開發功能。平臺所需算法并不是固定的,使用者可以根據自身實際應用場景進行AI算法的定制化開發,例如平臺經過不斷的迭代,目前能夠支持YOLOv8系列算法進行圖像標注。Spe...
-
山西智能圖像識別模塊廠家 2025-06-24 02:02:01目標識別算法是一種深度學習算法,其聰明程度需要我們不斷訓練,這就得益于大量的圖像標注,通過對車輛行駛環境的數據集的大量標注,能夠讓AI更加聰明,標注得越多,識別的精度就可能越高。但是大量的圖像標注跟工作顯然會耗費大量的時間精力。而慧視SpeedDP的出現很好地解決了這個問題。SpeedDP是一個深度...
-
成都國產化圖像識別模塊平臺 2025-06-23 17:02:25美國再度要求臺積電停止出口7納米芯片給大陸,目前看來國產AI圖像處理的性能還得由RK3588穩坐,不久前傳出了瑞芯微RK3688至少在一兩年內無法推出,因此對于許多有高性能AI圖像處理板需求的客戶無需再等了。當下,選擇RK3588至少還可以保持性能***兩三年,而在國內進行RK3588開發的廠家中,...
-
云南RK3399Pro主板圖像識別模塊算法定制 2025-06-23 06:02:16如今,AI已走入萬千企業,其展現出的強大賦能作用,讓無數企業受益。尤其實在制造業中,AI能夠賦能多個領域,讓企業更加高效、更加節能。例如許多大型的紡織工廠,定期的機器巡檢以及對產品的質檢至關重要。傳統模式是采用人工巡檢,大量的巡檢人員對很大程度上小小的紡織機器和產品進行肉眼質檢,雖然這種模式效率低、...
與圖像識別模塊相關的問題
新聞資訊
產品推薦
-

湖北智慧園區AI智能服務平臺
2025-07-12 -
湖南安全圖像標注
2025-07-12 -

海南自主可控圖像標注應用
2025-07-12 -

深度學習AI智能應用
2025-07-12 -

吉林應急救援AI智能人臉識別
2025-07-12 -

貴州專業AI智能處理板
2025-07-11 -
河北圖像識別模塊技術
2025-07-11 -

四川智慧安防AI智能解決方案
2025-07-11 -
貴州人工智能AI智能視覺
2025-07-11