
提出一種往復(fù)式壓縮機(jī)示功圖處理方法以及基于卷積神經(jīng)網(wǎng)絡(luò)機(jī)器學(xué)習(xí)的智能往復(fù)式壓縮機(jī)故障診斷流程。使用等參元?dú)w一化方式處理示功圖,處理后的樣本經(jīng)卷積神經(jīng)網(wǎng)絡(luò)分類(lèi)識(shí)別,可實(shí)現(xiàn)往復(fù)式壓縮機(jī)自學(xué)習(xí)、智能故障診斷。使用等參元?dú)w一化方法,可無(wú)需考慮工藝變化、環(huán)境改變等造成示功圖圖形改變的因素,這樣示功圖的處理方式...
故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)基本參數(shù)
- 品牌
- VALENIAN,瓦倫尼安
- 型號(hào)
- PT650
- 類(lèi)型
- 臺(tái)式
- 加工定制
- 是
- 用途
- 高校教學(xué)
- 電機(jī)功率
- 15
- 外形尺寸
- 147X7378
- 重量
- 60
- 產(chǎn)地
- 蘇州
- 廠家
- 昆山漢吉龍測(cè)控技術(shù)有限公司
故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)企業(yè)商機(jī)
.滾動(dòng)軸承是旋轉(zhuǎn)機(jī)械的關(guān)鍵部件,工作在高速,高溫以及高載荷的變工況下,極易發(fā)生故障,因此,對(duì)滾動(dòng)軸承進(jìn)行故障診斷和全壽命預(yù)測(cè)從而實(shí)現(xiàn)故障單期預(yù)警和精確的維修決策,避免故隙引發(fā)的事故BTS100軸承壽命預(yù)測(cè)測(cè)試臺(tái),可以開(kāi)展軸承壽命加速實(shí)驗(yàn),實(shí)驗(yàn)原理就是在不改變軸承失效機(jī)理,不增加新的失效模式的前提下,通過(guò)提高試驗(yàn)軸承應(yīng)力水平的方法來(lái)加速其失效進(jìn)程,然后再根據(jù)試驗(yàn)數(shù)據(jù)運(yùn)用數(shù)理統(tǒng)計(jì)理論估算出正常應(yīng)力下軸承的壽命的數(shù)據(jù)。軸承外圈的故障特征信息被噪聲所包圍。用本文所提方法對(duì)軸承外圈故障信號(hào)進(jìn)行分析,多目標(biāo)粒子群優(yōu)化算法(參數(shù)與“4.仿真信號(hào)分析”的設(shè)置相同)優(yōu)化VMD參數(shù)得到的Pareto解集及目標(biāo)值如表2所示。從表2中可以看出,當(dāng)**以信息熵、峭度、相關(guān)系數(shù)其中一個(gè)指標(biāo)評(píng)價(jià)時(shí),參數(shù)組合選擇序號(hào)11時(shí),f3**小,即相關(guān)系數(shù)取得**大值,而其對(duì)應(yīng)的信息熵和峭度既不是較優(yōu)值也不是**差值,一方面說(shuō)明相關(guān)系數(shù)和峭度以及信息熵之間是沒(méi)有***的,另一方面說(shuō)明如果**以相關(guān)系數(shù)評(píng)價(jià)時(shí),并沒(méi)有考慮到軸承故障沖擊性以及與周期性,在此參數(shù)組合下,對(duì)原始信號(hào)進(jìn)行分解實(shí)驗(yàn)臺(tái)的故障數(shù)據(jù)可以用于哪些方面?云南馬達(dá)故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)
故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)
PT700在內(nèi)轉(zhuǎn)子驅(qū)動(dòng)電機(jī)機(jī)座上設(shè)置有內(nèi)轉(zhuǎn)子驅(qū)動(dòng)電機(jī),內(nèi)轉(zhuǎn)子驅(qū)動(dòng)電機(jī)通過(guò)主聯(lián)軸器和內(nèi)轉(zhuǎn)軸連接,套在內(nèi)轉(zhuǎn)軸上的內(nèi)轉(zhuǎn)子左輪盤(pán),內(nèi)轉(zhuǎn)子左支承結(jié)構(gòu),內(nèi)轉(zhuǎn)子右輪盤(pán)和內(nèi)轉(zhuǎn)子右支承結(jié)構(gòu)沿中心軸線依次連接;套在外轉(zhuǎn)軸上的外轉(zhuǎn)子左支承結(jié)構(gòu),外轉(zhuǎn)子左輪盤(pán)和外轉(zhuǎn)子右輪盤(pán)沿中心軸線依次連接.本發(fā)明采用可調(diào)剛度的彈性支承,可實(shí)驗(yàn)支承剛度對(duì)雙轉(zhuǎn)子動(dòng)力特性的影響;可以模擬航空發(fā)動(dòng)機(jī)雙轉(zhuǎn)子質(zhì)量不平衡,轉(zhuǎn)子碰摩和支座松動(dòng)等機(jī)械故障.轉(zhuǎn)靜件碰摩狀態(tài)下的葉片振動(dòng)載荷和振動(dòng)特性測(cè)試分析,基于彈性基礎(chǔ)的內(nèi)外雙轉(zhuǎn)子故障模擬實(shí)驗(yàn)臺(tái),涉及航空發(fā)動(dòng)機(jī)實(shí)驗(yàn)裝置.本實(shí)驗(yàn)臺(tái)的結(jié)構(gòu)主要是:在外轉(zhuǎn)軸內(nèi)設(shè)置有內(nèi)轉(zhuǎn)軸,兩者中心軸線重合,通過(guò)中介支承結(jié)構(gòu)機(jī)高質(zhì)量故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)操作故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)的實(shí)驗(yàn)數(shù)據(jù)至關(guān)重要。
數(shù)據(jù)采集系統(tǒng)查找您想要的產(chǎn)品系列全部產(chǎn)品分布式數(shù)據(jù)采集系統(tǒng)集中式數(shù)據(jù)采集系統(tǒng)堅(jiān)固型數(shù)據(jù)采集系統(tǒng)便攜式數(shù)據(jù)采集系統(tǒng)無(wú)線數(shù)據(jù)采集系統(tǒng),主要功能:?故障軸承模擬:軸承內(nèi)圈故障、軸承外圈故障、軸承滾動(dòng)體故障、軸承保持架故障、軸承綜合故障(深溝球軸承)。?常見(jiàn)機(jī)械故障:機(jī)械松動(dòng)、不對(duì)中等試驗(yàn)。?不同轉(zhuǎn)速下的軸承故障頻率識(shí)別。?滾子軸承故障模擬(可選)聲強(qiáng)分析?記錄聲強(qiáng)原始時(shí)域數(shù)據(jù)?支持聲強(qiáng)的實(shí)時(shí)測(cè)試、顯示與事后處理分析聲壓分析?支持聲壓的實(shí)時(shí)測(cè)試、顯示與事后處理分析?可以提供聲壓時(shí)域曲線、頻域線譜與倍頻程等多種顯示方式?在聲壓倍頻程顯示方式中,提供1/1、1/3、1/6、1/12、1/24等多種頻帶設(shè)置方式?提供A、B、C、D、Wa、Wc等多種計(jì)權(quán)方式
往復(fù)壓縮機(jī)作為工業(yè)生產(chǎn)中的重要組成設(shè)備,保證其正常運(yùn)行具有極其重要的實(shí)際意義。根據(jù)相關(guān)研究統(tǒng)計(jì),氣閥故障大約占到了往復(fù)壓縮機(jī)故障總數(shù)的60%[1]。因此,有必要對(duì)往復(fù)壓縮機(jī)氣閥故障進(jìn)行深入的分析和研究。往復(fù)壓縮機(jī)氣閥在工作中會(huì)受到摩擦,沖擊等多種因素的干擾,導(dǎo)致其振動(dòng)信號(hào)具有強(qiáng)烈的非線性,非平穩(wěn)性特征[2]。針對(duì)上訴信號(hào),目前多采用小波分析、經(jīng)驗(yàn)?zāi)B(tài)分解(EMD)、變分模態(tài)分解(VMD)、熵值法、分形方法等對(duì)其進(jìn)行分析研究,其中,多重分形方法不僅可以深層次的描述氣閥信號(hào)非平穩(wěn)、非線性特征,同時(shí)可以描述氣閥振動(dòng)信號(hào)的自相似性,進(jìn)而可以更***準(zhǔn)確的提取往復(fù)壓縮機(jī)氣閥的故障特征故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)的技術(shù)不斷更新。

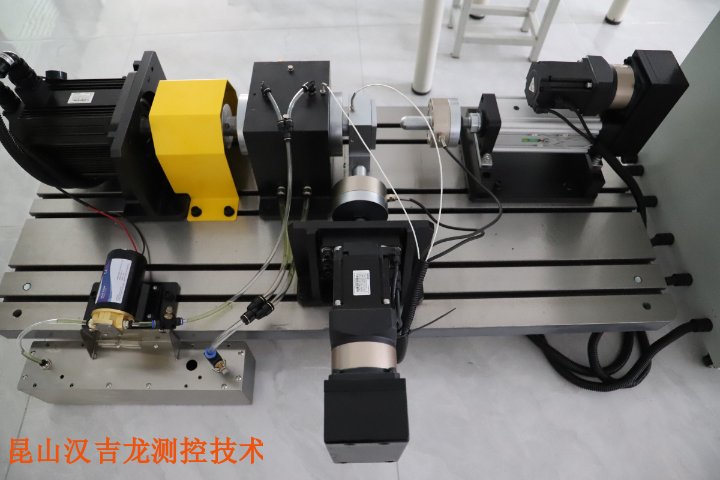
PT300測(cè)試臺(tái)組成:測(cè)試臺(tái)主要由微型直流電機(jī)、調(diào)速器、雙支撐軸承、動(dòng)平衡轉(zhuǎn)子盤(pán)、軸承、齒輪、轉(zhuǎn)軸、傳感器支架、減震基礎(chǔ)底座等組成,采用微型模塊化設(shè)計(jì),可用于現(xiàn)場(chǎng)測(cè)點(diǎn)分散的大型結(jié)構(gòu)靜力試驗(yàn)、擬靜力試驗(yàn)、疲勞試驗(yàn)等場(chǎng)合,能捕準(zhǔn)確捉材料由彈性區(qū)域進(jìn)入塑性區(qū)域整個(gè)過(guò)程的緩變信號(hào)。主要特點(diǎn)●采集器與控制器之間采用RS485總線星型連接●每個(gè)控制器可以控制8個(gè)采集器,每個(gè)采集器8通道或16通道可選●控制器支持POE供電、NTP同步,故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)的可靠性備受認(rèn)可。云南馬達(dá)故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)
故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)的實(shí)驗(yàn)過(guò)程需要嚴(yán)謹(jǐn)對(duì)待。云南馬達(dá)故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)
針對(duì)以上問(wèn)題,并根據(jù)軸承故障脈沖的周期性、沖擊性以及與原始信號(hào)相關(guān)性的特點(diǎn)得到VMD參數(shù)組合的比較好Pareto解集,再利用綜合評(píng)價(jià)指標(biāo)評(píng)價(jià)選擇比較好的參數(shù)組合方案,其次,信號(hào)分解并綜合評(píng)價(jià)選取比較好IMF提取故障特征,***利用仿真信號(hào)和實(shí)際軸承振動(dòng)信號(hào)分析,驗(yàn)證了所提方法的有效性。軸承出現(xiàn)故障后,運(yùn)行過(guò)程中會(huì)產(chǎn)生周期性的沖擊,其振動(dòng)信號(hào)就越有序,信息熵值也就越小。VMD分解得到的模態(tài)分量中,信息熵值越小的模態(tài)分量,包含著越多的軸承故障信息,越能反映當(dāng)前軸承的運(yùn)行狀態(tài)。云南馬達(dá)故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)
與故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)相關(guān)的文章

山西故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)操作
- 廣西軸故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái) 2025-05-09
- 平行軸齒輪箱故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)工作原理 2025-05-09
- 廣東故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)公司 2025-05-09
- 平行軸齒輪箱故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)圖片 2025-05-09
- 廣東共享故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái) 2025-05-09
- 陜西故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)使用 2025-05-09
- 電機(jī)故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)用途 2025-05-09
- 無(wú)錫故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)哪家好 2025-05-09
- 北京故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)制造商 2025-05-08
- 法國(guó)故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái) 2025-05-08
- 租賃故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)用途 2025-05-08
- 甘肅滑動(dòng)軸承油膜故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái) 2025-05-08
與故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)相關(guān)的產(chǎn)品


與故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)相關(guān)的新聞
-
海南故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)視頻 2025-04-18 08:07:28出了全壽命DynamicVibrationSimulator(動(dòng)態(tài)振動(dòng)模擬器)MachinerydiagnosisSimulator(機(jī)械診斷模擬器)Vibration&RemoteConditionMonitoringTestBench(振動(dòng)和遠(yuǎn)程狀態(tài)監(jiān)測(cè)試驗(yàn)臺(tái))VibrationAnalysis...
-
故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)設(shè)備 2025-04-18 05:06:30.滾動(dòng)軸承是旋轉(zhuǎn)機(jī)械的關(guān)鍵部件,工作在高速,高溫以及高載荷的變工況下,極易發(fā)生故障,因此,對(duì)滾動(dòng)軸承進(jìn)行故障診斷和全壽命預(yù)測(cè)從而實(shí)現(xiàn)故障單期預(yù)警和精確的維修決策,避免故隙引發(fā)的事故BTS100軸承壽命預(yù)測(cè)測(cè)試臺(tái),可以開(kāi)展軸承壽命加速實(shí)驗(yàn),實(shí)驗(yàn)原理就是在不改變軸承失效機(jī)理,不增加新的失效模式的前提下,...
-
機(jī)械故障故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)廠家排名 2025-04-18 07:14:35出了全壽命DynamicVibrationSimulator(動(dòng)態(tài)振動(dòng)模擬器)MachinerydiagnosisSimulator(機(jī)械診斷模擬器)Vibration&RemoteConditionMonitoringTestBench(振動(dòng)和遠(yuǎn)程狀態(tài)監(jiān)測(cè)試驗(yàn)臺(tái))VibrationAnalysis...
-
山東故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)定制 2025-04-17 10:07:461、旋轉(zhuǎn)機(jī)械振動(dòng)分析及故障診斷試驗(yàn)平臺(tái) 2、柔性轉(zhuǎn)子振動(dòng)試驗(yàn)臺(tái) 3、剛性轉(zhuǎn)子振動(dòng)試驗(yàn)臺(tái) 4、行星齒輪故障診斷試驗(yàn)平臺(tái) 5、齒輪故障診斷試驗(yàn)發(fā)動(dòng)機(jī)轉(zhuǎn)子動(dòng)力學(xué)實(shí)驗(yàn)平臺(tái)轉(zhuǎn)子動(dòng)力學(xué)綜合教學(xué)實(shí)驗(yàn)系統(tǒng)是針對(duì)高等院校和科研院所力學(xué)與機(jī)械類(lèi)專(zhuān)業(yè)轉(zhuǎn)子動(dòng)力學(xué)等相關(guān)課程而設(shè)計(jì)的實(shí)驗(yàn)教學(xué)和研究用儀器。它通過(guò)設(shè)定柔性轉(zhuǎn)子軸系...
與故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)相關(guān)的問(wèn)題
與故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)相關(guān)的標(biāo)簽
新聞資訊
產(chǎn)品推薦
-
福建俄羅斯激光對(duì)中儀
2025-07-11 -

湖南設(shè)備激光對(duì)中儀
2025-07-11 -

瑞典激光對(duì)中儀器寫(xiě)論文
2025-07-11 -

專(zhuān)業(yè)級(jí)激光對(duì)中儀器保養(yǎng)
2025-07-11 -

在線激光對(duì)中儀定制
2025-07-11 -

無(wú)錫激光對(duì)中儀怎么用
2025-07-11 -

國(guó)產(chǎn)激光對(duì)中儀器定做
2025-07-11 -

軸激光對(duì)中儀操作
2025-07-11 -
吉林旋轉(zhuǎn)機(jī)械激光對(duì)中儀
2025-07-11